Эпизод намба 3.
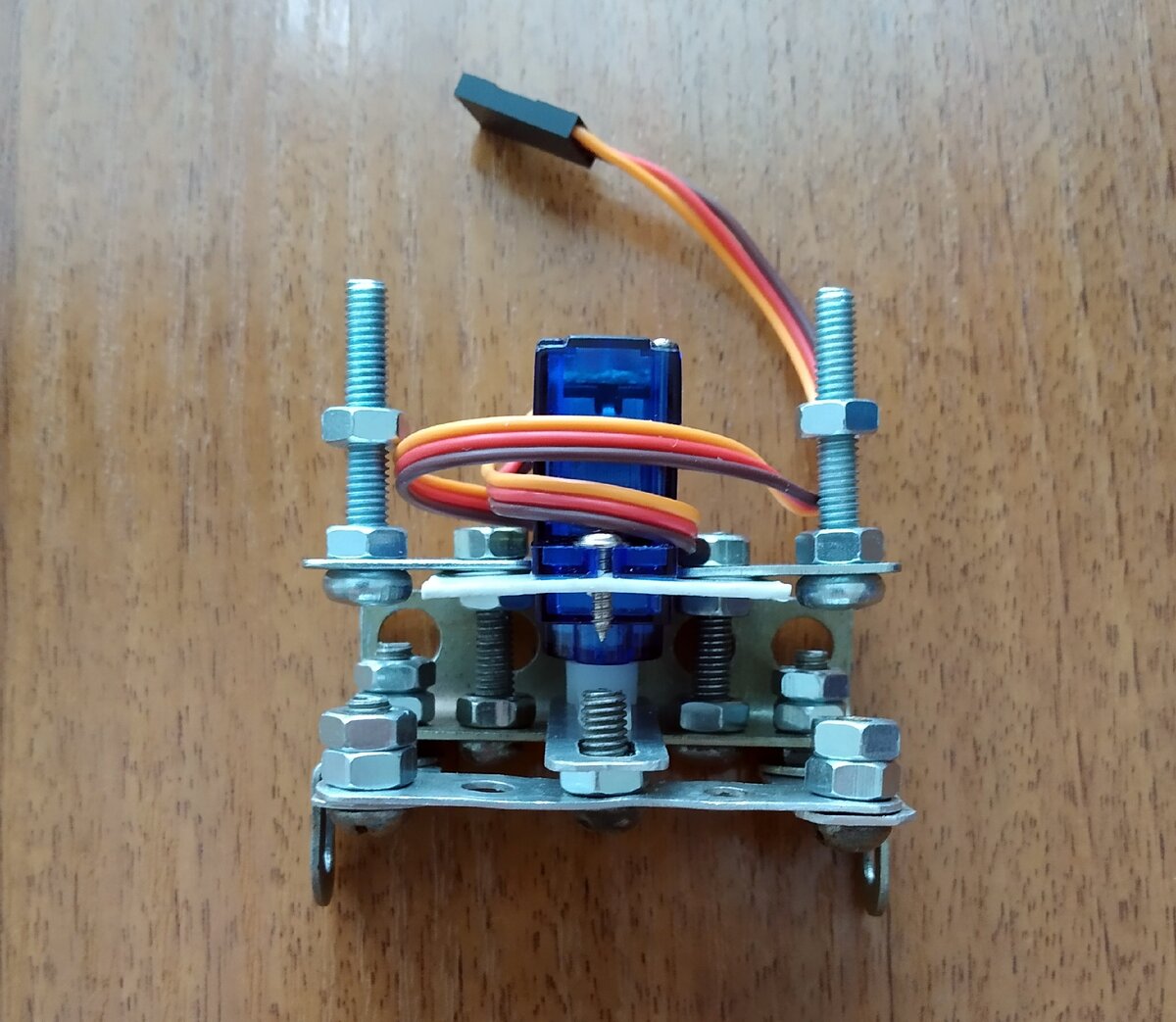
Немного об устройстве рулевого механизма.
Он полностью собран из пластин и уголков от старого конструктора. Плюс, одна деталь – плита для крепления серво – вырезана лобзиком из пластика. Конечно, в шарнирах присутствуют бешенные люфты, а в некоторых положениях наоборот, наблюдаются заедания. В будущем, надо будет полностью механизм переделать, разумеется, с более точной подгонкой деталей. Но, как тестовый вариант в качестве «быстросбора» пойдет.
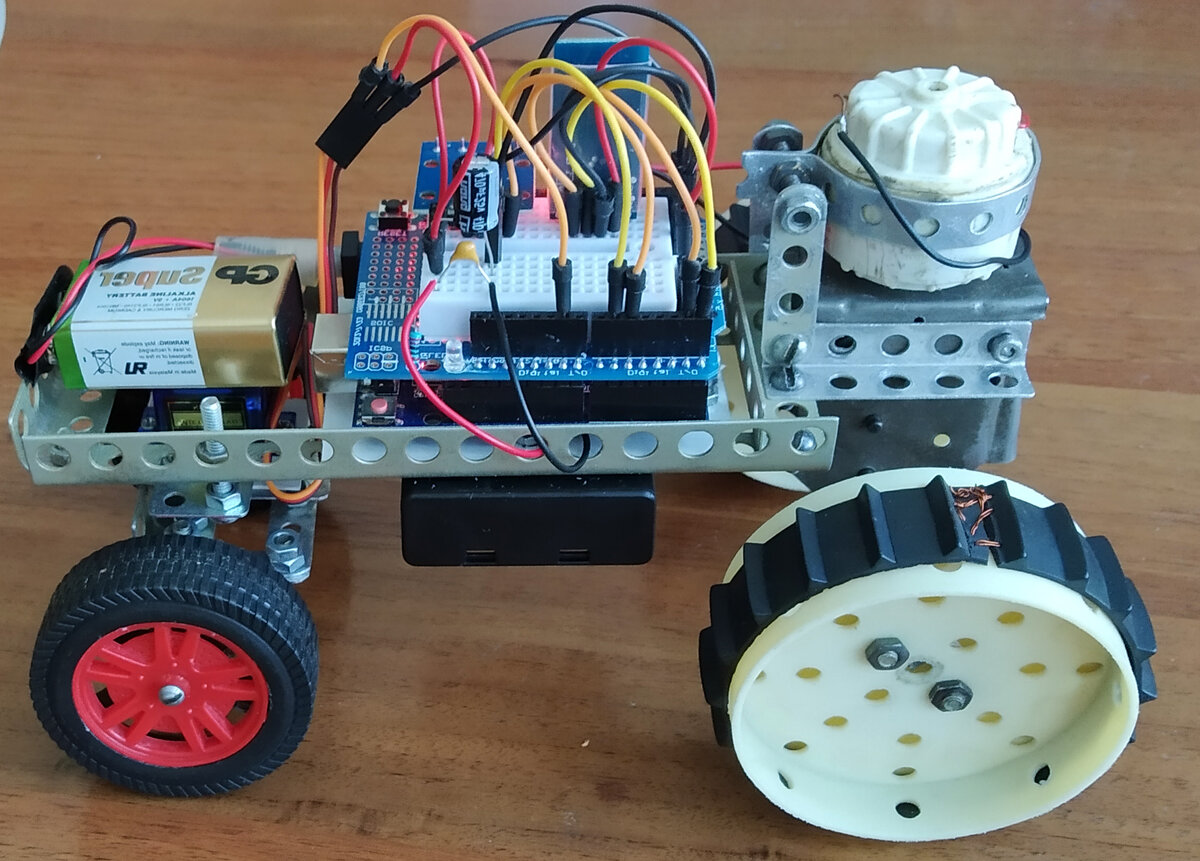
За сам поворот рулевой трапеции отвечает простейший сервопривод SG90S. Такие сервы считаются дохленькими, но для текущего диаметра колес и веса модели усилия вроде хватает.
За ходовую часть, как упоминалось в прошлом эпизоде, отвечает редуктор от старой игрушки: танка «Гвардеец», выпускавшейся заводом им. Октябрьской Революции в моем родном городе в те далекие времена, когда мне лет было меньше, чем сейчас моему сыну.
Передаточное соотношение редуктора приблизительно 1:100. Точнее посчитать не получилось.
Корпус редуктора помят и имеет несколько несимметричную форму. Плюс, когда-то подвергался разборке и последующей сборке, с выкидыванием лишних деталей, типа шайбочек и проставочек. В результате, оси слегка перекошены и шестерни иногда подклинивают. Поэтому, от напряжения порядка 3В электродвигатель не всегда может провернуть колеса даже без нагрузки. Пока что этот момент решился в лоб, путем использования 3-х батареек формата АА с суммарным напряжением 4.5В.
Сопротивление обмотки двигателя Гном-2М сначала было что-то около 15 Ом, но после некоторой приработки щеток, которые окислялись на протяжении 30-ти лет, уменьшилось до 2-ух.
При имеющемся передаточном соотношении тяга получается просто зверская.
А теперь, на закуску, видосик, как, собственно, эта техника передвигается. Самые внимательные могут заметить, что передняя ось заметно недогружена, в результате чего при больших углах поворота колес идет проскальзывание всего передка. Думаю, частично эту проблему можно решить «обрезиниванием» пластиковых передних шин и переносом центра тяжести поближе к передней же оси. Задние колеса, благодаря резиновым гребням имеют просто адский зацеп, как по линолеуму, так и по ковровым покрытиям. Тестов на outdoor еще не проводилось.
Радует, что схема оказалась вполне рабочей. И если за механическую часть я особенно не переживал, так как имелся некоторый опыт в подростковом возрасте по созданию самобеглых аппаратов. То вот, получится ли написать собственную прошивку для Ардуино, потом собственное приложение на Андроид, а затем подружить их вместе через Bluetooth – вот здесь были серьезные сомнения в успешности мероприятия. Разумеется, апу и прошивку еще фиксить и оптимизировать, но начало положено. Можно уже начинать кричать в стиле профессора Франкенштайна: It’s аlive!
Короче, как показывает нам реальность, данная в ощущениях – проект шаг за шагом приближается к безоговорочному сакцессу!
З.Ы. подписывайтесь и ставьте лайк, кто еще не…