С давних времен люди пытались создать устройство, повторяющее полет птицы. Еще в 1490 году Леонардо да Винчи строил модели крыльев, вдохновляясь полетом птиц.
В 1889 году Отто Лилиенталь опубликовал книгу «Птичий полет как основа», где подробно описал полет чайки с точки зрения физики.
В 2006 году группе профессора доктора Джеймса впервые удалось взлететь на летательном аппарате, приводимым в действие механизмом взмахом крыла, в комплекте с пилотом.
В августе 2010 года летательный аппарат, приводимый в движение только мышечной силой пилота, преодолел расстояние около 150 метров после буксировки.
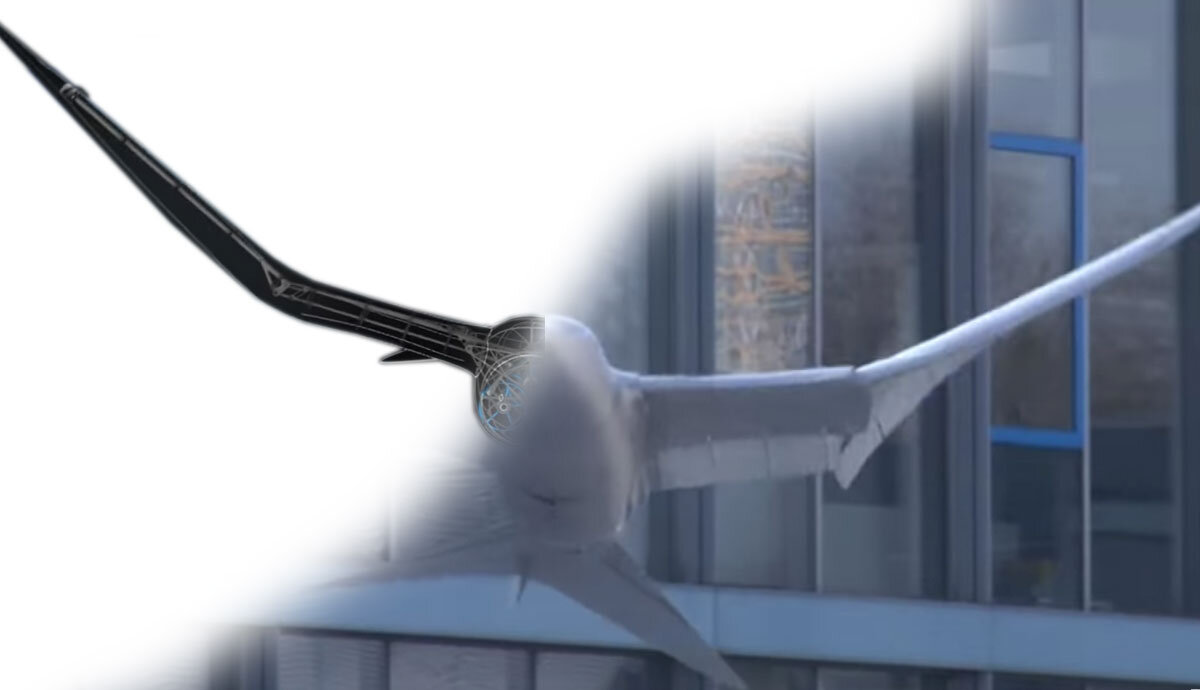
В 2011 году инженеры отдела бионического техники компании Festo разработали модель, которая способна взлететь, поднимаясь в воздух только с помощью взмахов крыльев, без помощи других устройств.
Полученный опыт был положен в основу проекта, целью которого было построение бионической птицы по образцу чайки.
Конструкция должна отвечать всем требованиям аэродинамики, а мощности двигателей должно быть достаточно, для осуществления полета.
Крыло
Кинематика крыла состоит из двух основных движений. Во-первых это движение вверх - вниз,
Рычажный механизм позволяет увеличить степень отклонения от туловища до кончика крыла.
Во-вторых, крыло поворачивается так, что его передний край направлен вверх во время хода вверх, в этот момент крыло принимает положительный угол атаки.
Каждое крыло механической птицы состоит из двухкомпонентного лонжерона с опорным подшипником.
Активное скручивание достигается с помощью сервомотора .
Когда механическая птица поднимает крылья, сервомотор поворачивает кончики крыльев, делая угол атаки положительным, в процессе движения угол атаки изменится на отрицательный
Тело
Туловище - надежный корпус для механизмов и аппаратуры.
В туловище механической птицы размещены: аккумулятор, двигатель и трансмиссия, кривошипно-шатунный механизм, электронные блоки управления.
Крылья приводятся в движение с помощью роторного двигателя, соединенного с двухступенчатой винтовой трансмиссии
Кривошипно-шатунный механизм не достигает мертвой точки и поэтому работает равномерно с минимальными пиковыми нагрузками, обеспечивая плавный полет.

Противоположное движение секций головы и туловища осуществляется с помощью двух электродвигателей
Таким образом, туловище изгибается, меняется его аэродинамика и положение центра тяжести, это делает механическую птицу очень подвижной и маневренной.
Хвостовая часть
Хвостовая хвост помогает птице подняться и служит механизмом управления, он как и хвостовое оперение самолета, позволяет изменять угол тангажа и рысканья
Хвост помогает птице лететь по прямой линии, действуя аналогично вертикальному стабилизатор самолета.
Для осуществления поворота хвост наклоняется впарво или влево, когда он вращается вокруг продольной оси, создается момент рыскания вокруг вертикальной оси.
Система управления
Бортовая электроника обеспечивает точное и, следовательно, эффективное управление крученем крыла в зависимости от его положения.
Микроконтроллер управляет двумя серводвигателями, которые предают кручение каждому крылу. Данные об изгибе и кручении крыла обрабатываются в течение нескольких миллисекунд
Положение и кручение крыла контролируются с помощью двусторонней радиосвязи, также отслеживаются такие параметры, как заряд батареи, энергопотребление.
Интеллектуальная система управления способна адаптироваться к новым условиям во время полета.
Технические характеристики птицы
Движение и подъем механической птицы достигаются исключительно взмахом крыльев, мощность необходимая для их работы - 25 Вт.
Масса механической птицы составляет около 400 грамм, размах крыльев - 2 метра.
Напоследок отвечу на поставленный в заголовке вопрос. Можно ли создать механическую птицу? Она уже создана, летает, удивляет, а в будущем наверняка будут созданы и другие экземпляры с большими возможностями.