Сначала готовим комплект деталей:
1) Корпус:
- Пластиковые 3д печатные детали
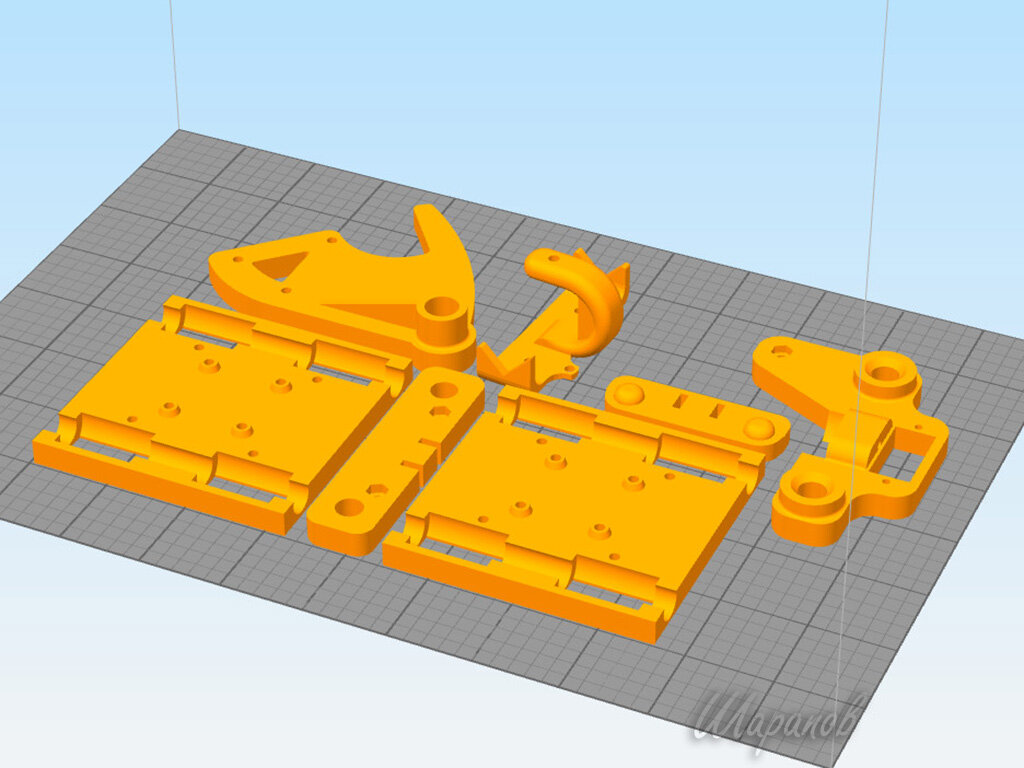
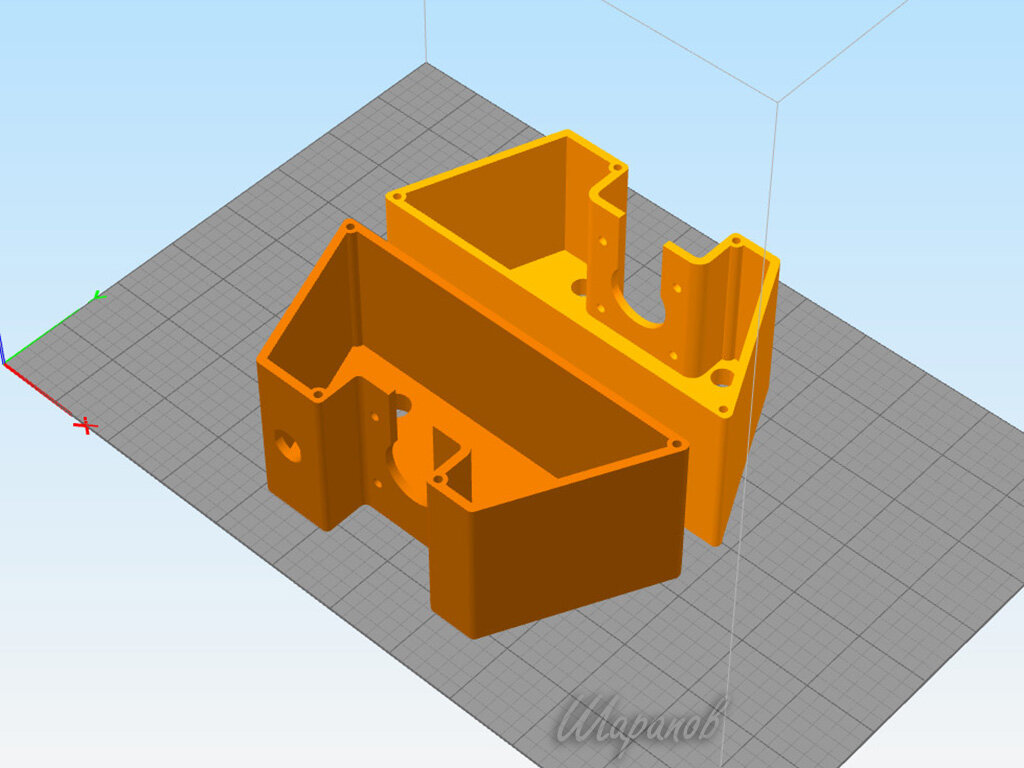
Если нужно - пишите, пришлю STL-модели для 3д печати деталей
- Резьбовая шпилька М10 длина 420мм - 2шт.
- алюминиевая трубка 8мм длина 420мм - 1 шт
2) Механика:
- цилиндрические направляющие 8 мм - длиной 400мм - 2 шт и 320 мм - 2шт.
- Линейные подшипники LM8UU - 8шт.
- шкив GT2 для шд 20 зубов на ось 5 мм - 2шт.
- натяжитель зубчатый GT2 на ось 3мм
- Ремень GT2 6мм - полтора метра
- Подшипники F623ZZ - 10шт.
3 ) Электроника:
- Шаговые двигатели Nema 17 17HS4401 2шт
- Ардуино нано 1шт
- драйвер шагового двигателя А4988 - 2шт
- Серва SG90 - 1шт
-макетная плата 40х45 мм
- блок притания 12в 2а - 1шт
(я вместо блока питания поставил бокс с 3 аккумуляторами 18650)
4) крепёж:
- гайка М10 - 8шт
- винт м3х30 - 9шт
- винт м3х10 - - 8шт
- винт м3х20 - 1шт
- винт м3х12 - 2шт
- кучка гаек м3
- пара винтов м2,5х6 для крепления сервомотора
Начинаем сборку!
Начинаем с держателя линейных подшипников (листайте галерею вправо)
Оставшиеся два подшипника запрессовываем в качалку
Далее собираем основание. Берём левый корпус, и втыкаем в него две направляющие 400 мм, алюминиевую трубку и 2 резьбовые шпильки. Шпильки изнутри и снаружи корпуса фиксируем гайками.
Далее на направляющие надеваем уже собранную каретку, и устанавливаем на шпильки правый корпус. Затягиваем гайками.
Ставим на плоскую поверхность и проверяем, чтобы две половинки основания ровно без перекосов лежали на плоскости.
Устанавливаем шкивы на шаговые моторы и крепим моторы в корпусах.
Алюминиевая трубка служит для того, чтобы в ней пропустить провод из правого шагового двигателя в левый корпус, где у нас расположены драйверы и ардуино
На держатель сервы устанавливаем сервомоторчик (два шурупчика или два винта м 2,5х6) и шкив-натяжитель. В большие отверстия втыкаем направляющие 320 мм (держатся на трении)
Направляющие с держателем сервы вводим в каретку, и с противоположного конца устанавливаем основание натяжителя ремня.
Три проводочка, которые идут к серве, чтоб не волочились по направляющим, я примотал к ptfe-трубке, концы которой закрепил на держателе шагового двигателя и на левом корпусе.
Устанавливаем держатель пера на качалку, а качалку винтом м3х30 крепим к держателю сервы.
Пропихиваем ремень:
Теперь собираем электронику
Вот по этой схеме:
Вживую это выглядит так:
На одной из стенок я закрепил бокс с 3 аккумуляторами 18650. Мне удобнее когда меньше проводов. Вместо аккумов можно подключить адаптер на 12В 2А.
Ну вот, сборка завершена. Боковые крышки - это уже по желанию. можно ставить, а можно забить.
Видео
Подписывайтесь на канал, чтобы не пропустить новые интересные материалы. Понравилась статья - ставьте лайк :)
На моём канале есть статьи:
- что надо установить на компьютер и как подготовить задание ня рисующего робота
- про то, как сделать этот аппарат автономным (чтобы он смог рисовать без компьютера)



















