Всем привет! Сегодня я покажу вам как создать робота, управляемого по Bluetooth со смартфона. В этом уроке использованы:
1. Плата Arduino Uno с кабелем для подключения к компьютеру
2. Компьютер с установленной Arduino IDE и драйверами для плат
3. Соединительные провода
4. Драйвер двигателей L298N
5. Bluetooth модуль HC-05 или HC-06
6. Двигатели с колёсами
7. Корпус робота
8. Аккумуляторы 18650 2 штуки и бокс для них
Ссылки на уроки по L298N и Bluetooth модулю
Вот ссылки на мои уроки по Bluetooth модулю и драйверу L298N:
Драйвер двигателей L298N. Подключение к Arduino и управление двумя двигателями
Описание робота
Корпус робота, двигатели и электронные компоненты я взял из набора "Мобильные роботы на базе Arduino". Натолкнулся я на этот набор когда ещё только начал заниматься Arduino. Помню, как провозился целый месяц, чтобы робот наконец-то начал слушаться смартфона))) Заказать его можно как в некоторых интернет магазинах, так и на официальном сайте. Вместе с набором идут компоненты для сборки роботов, о которых я расскажу в своих дальнейших статьях.
Вот как выглядит робот из набора (извиняюсь за качество фото, лучше сделать не могу):
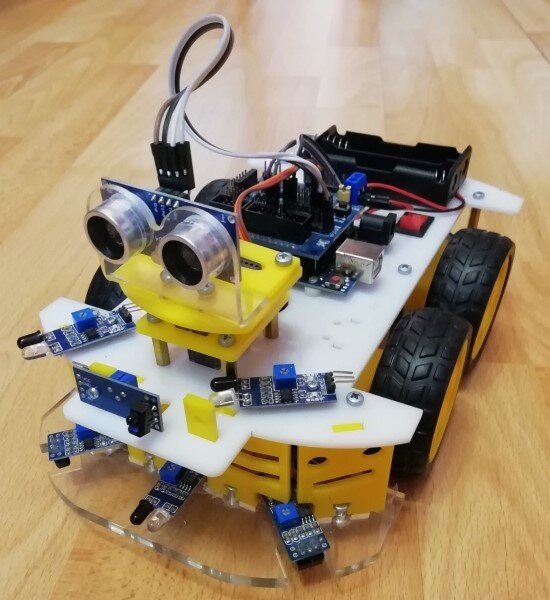
Робот имеет четыре мотора с четырьмя колёсами. Управляться он будет со смартфона с помощью программы Bluetooth RC Controller, о которой я уже писал в статье про Bluetooth модуль. Давайте же приступим к написанию программы для нашего робота, но сначала нужно его собрать.
Инструкция по сборке робота
Вот инструкция по сборке робота из набора (листайте по стрелочкам):

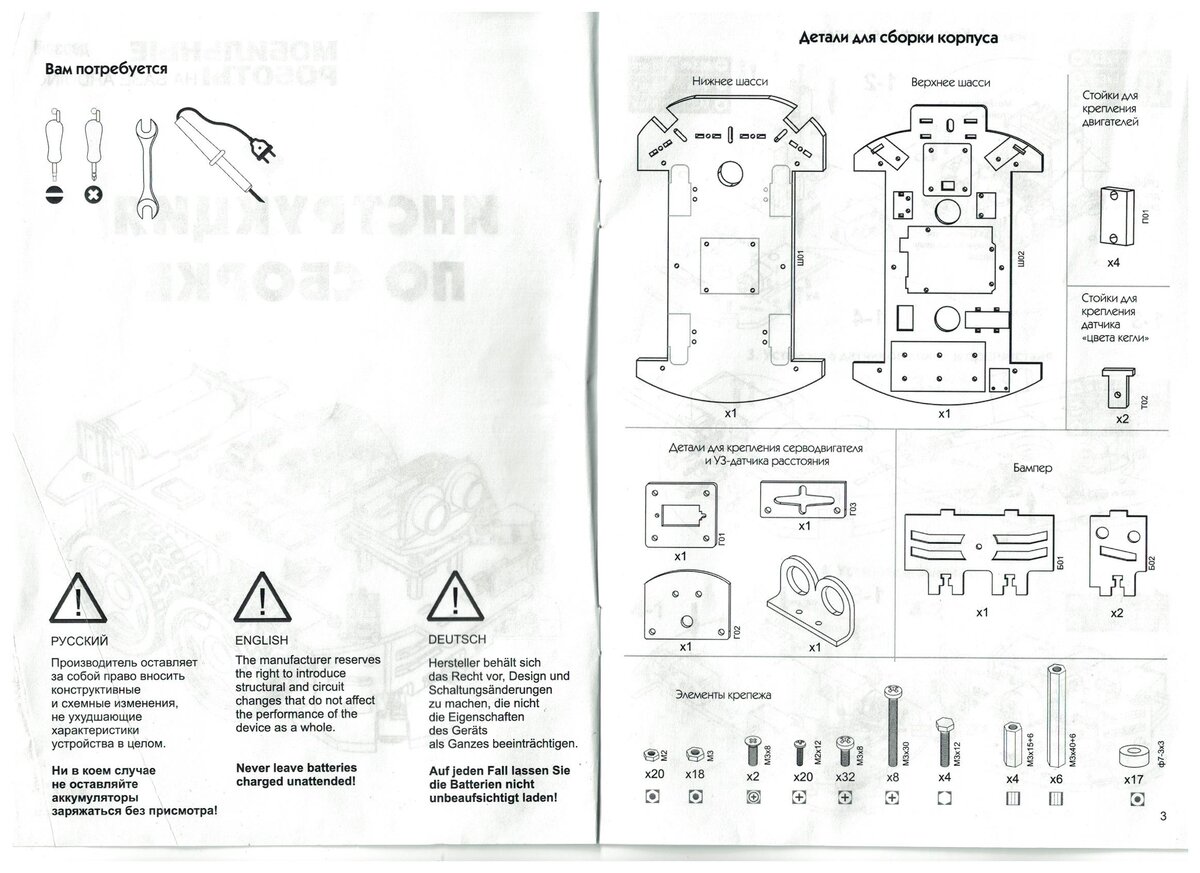
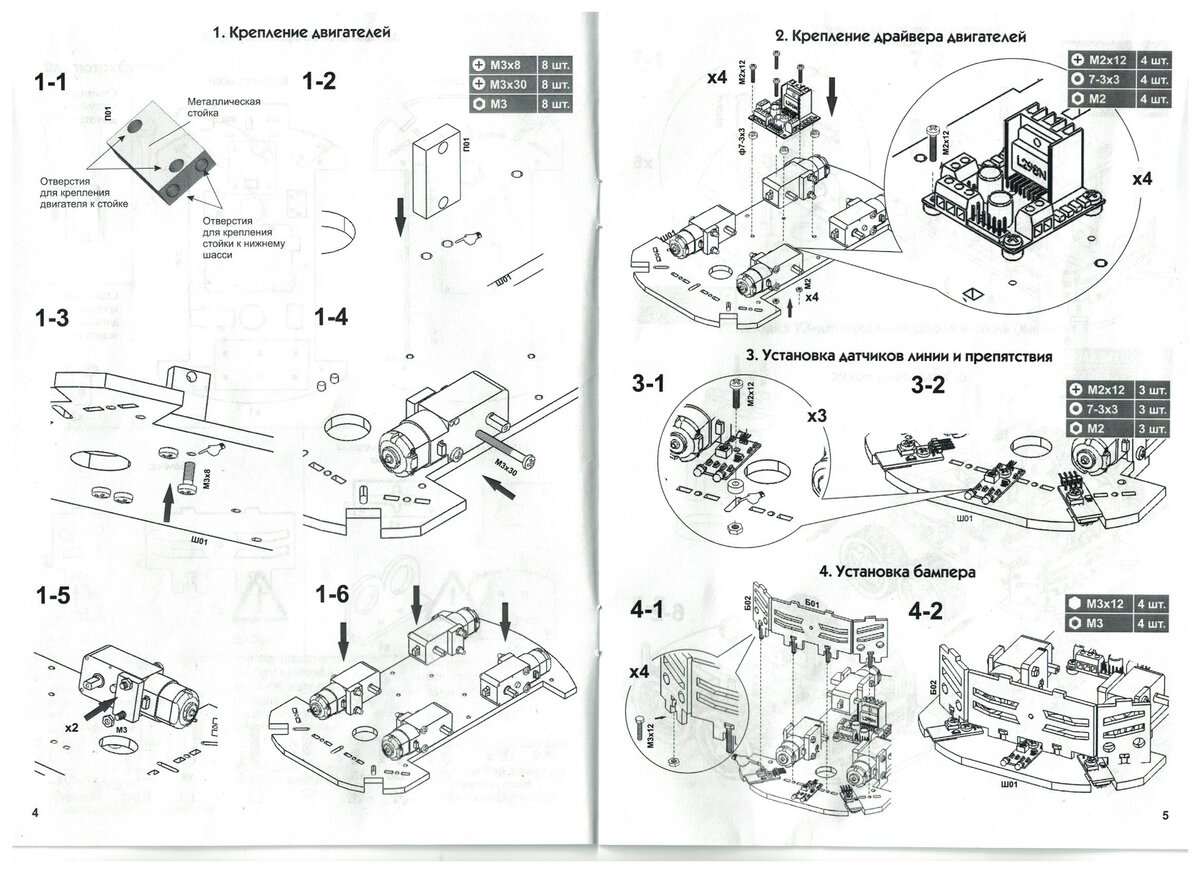
Схема робота
Робот собирается как на схеме ниже.
Приношу извинения, но на схеме подключения у драйвера L298N отсутствуют контакты ENA и ENB. Куда их подключать сказано ниже.
Схема сборки робота:
+(Аккумулятор) - 12V(L298N)
-(Аккумулятор) - Gnd(L298N)
Vin(плата Arduino) - 5V(L298N)
Gnd(плата Arduino) - Gnd(L298N)
5V(Bluetooth модуль) - 5V(L298N)
Gnd(Bluetooth модуль) - Gnd(L298N)
TX(Bluetooth модуль) - RX(плата Arduino)
RX(Bluetooth модуль) - TX(плата Arduino)
+(Левые двигатели) - IN1(L298N)
-(Левые двигатели) - IN2(L298N)
+(Правые двигатели) - IN3(L298N)
-(Правые двигатели) - IN4(L298N)
IN1(L298N) - Pin2(плата Arduino)
IN2(L298N) - Pin3(плата Arduino)
IN3(L298N) - Pin4(плата Arduino)
IN4(L298N) - Pin5(плата Arduino)
ENA(L298N) - Pin10(плата Arduino)
ENB(L298N) - Pin11(плата Arduino)
Архив проекта
Помещать скетч в статью я не стану, так как он довольно большой. Архив со скетчем и схемой сборки можно скачать отсюда.
Вывод
Теперь наш робот научился слушаться смартфона. Следующим проектом будет робот, двигающийся по чёрной линии. А на этот раз всё, всем спасибо за внимание! Не забудьте оценить статью, для вас это не сложно, а для меня очень нужно. Пишите вопросы в комментариях, я постараюсь на них ответить.