Всем знаком график переходного процесса теоретического ПИД регулятора из теории автоматического управления (ТАУ, ТАР). Он настолько привычен, что часто не вызывает вопросов и воспринимается как шаблон.
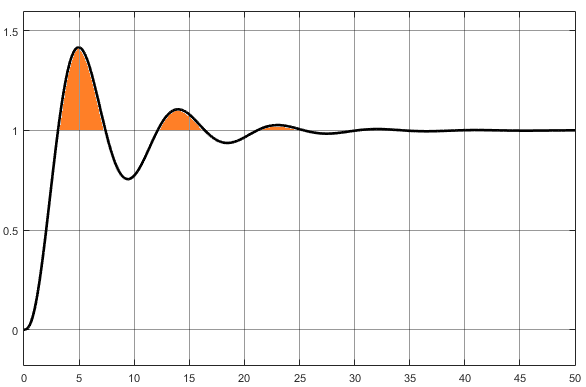
Но в реальных технологических процессах, связанных с нагревом такой переходный процесс с перерегулированием почти в 50% не допустим. Рассмотрим примеры, чтобы понять почему.
Пример 1: термообработка металлов
При необходимости получения определенного цвета побежалости на стальных изделиях необходимо точно выйти на заданную температуру иначе цвет получится другой.

Это пример видимого признака перегрева заготовки, но основные изменения приходятся на структуру материалов и часто не определяемы без дополнительных проверок и разрушающего контроля. Поэтому, важно не допускать перегрева в печах при процессах спекания, отжига, закалки, отпуска, старении и нормализации.
Пример 2: нагрев жидкостей и пара
Насыщенный сухой пар при температуре 100 С создает давление равное 100 кПа, а при температуре 110 С уже давление 143 кПа. То есть при изменении температуры на 10% давление увеличивается на 43%.
В этом случае переходный процесс, приведенный в начале статьи, приведет к срабатыванию защиты и\или к повреждению элементов системы из-за высокого давления в ней, что недопустимо в котлах, парогенераторах, теплообменниках, сепараторах, химических реакторах и другом подобном оборудовании.
Пример 3: биореакторы
Биореакторы (ферментёры) используются для процессов микробиологического синтеза веществ для фармацевтической и пищевой промышленности. Используемые в них культуры микро организмов крайне чувствительны к изменениям условий, в частности температуры.
В зависимости от типа культуры в основном гибнут при температурах от 30 до 37 градусов, но при этом их температура активности и репродуктивности также крайне близка к этой температуре и составляет 28-35 градусов. По этому при реакции на любое возмущение контур регулирования температуры недолжен допустить перерегулирования.
Как не допускать перегрева?
Ответ будет простым: использовать современные цифровые ПИД-регуляторы с нужными функциями. Многие специалисты после этой фразы ухмыльнулись: «Реклама все это, а они все одинаковые». Однако, это действительно так: очень много производителей цифровых ПИД регуляторов используют очень простые структуры (из 80-х годов) цифровых ПИД регуляторов и автонастройки, для использования более дешевых процессоров и меньших затрат на программирование и программистов, что приводит к соответствующему качеству регулирования.
Рассмотрим современные ПИД регуляторы на примере контроллеров-регуляторов ASCON TECNOLOGIC серии KUBE.
- Реализованный ASCON TECNOLOGIC алгоритм ПИД регулирования с 2 степенями свободы (2-ПИД) обеспечивает более устойчивое и одновременно динамичное управление процессом.
- Один из двух режимов автоматической настройки коэффициентов ПИД Fast tune позволяет, позволяет проводить автонастройку без колебательного процесса и обеспечивает выход на заданную температуру без перерегулирования.
Автонастройка не требует участия человека и может проводиться автоматически после включения питания или изменения задания, для компенсации изменения параметров системы.
- Переходный процесс полученный методом сходящихся колебаний (Oscillating tune), в случае наличия перерегулирования, легко привести к нужной форме меняя всего один параметр: Fuoc - управление перерегулированием.
Выход на заданную температуру после автонастройки Oscillating tuneЗадав значение в интервале от 0,00 до 1,00, можно замедлить переходный процесс. При установке Fuoc = 1,00 эта функция отключена, для Fast tune всегда устанавливается равной 0,50.
Рекомендуем так же ознакомиться со следующими нашими статьями по данной тематике:
Каскадное регулирование с контроллерами KUBE
Многозонные системы регулирования с контроллерами KUBE
ПИД регулятор и управление температурой при использовании дискретного клапана
Управление клапанами и задвижками (МЭО) в системах регулирования технологического процесса