Во первых, что такое "момент". В предыдущей статье Еще раз о скалярных и векторных параметрах материальной точки в КМН я описал векторные параметры м.т. Моменты м.т. – еще один из видов параметров м.т., связанные в общем-то с изотропностью пространства, а в более широком смысле – также и с его галилеевостью и однородностью. В математическом плане момент есть векторное произведение радиус-вектора положения м.т. на некий ее векторный параметр. Например, скоростью, ускорением, импульсом и силой. В конце статьи дам четырех- и пятимерные представления тих "моментных" параметров.
Сначала общее определение понятия "момент".

Момент вектора, или векторное произведение двух векторов
Пусть Aⁱ – векторный параметр м.т. Тогда общим определением момента M является уравнение в векторной форме как трехмерный аксиальный вектор:
Mⁱ = [r × A] = (M¹, M², M³):
Mⁱ = (r²A³ – r³A², r3A¹ – r¹A³, r¹A² – r²A¹1):
M¹ = r²A³ – r³A²,
M² = r³A¹ – r¹A³,
M³ = r¹A² – r²A¹.
Свойство "аксиальность" означает, что при перестановке "множителей" векторного произведения изменяется знак результата: [r × A] = - [A × r]. Из этого определения также можно увидеть, что на самом деле момент является антисимметричным тензором ранга 2. Ранг тензора равен количеству индексов тензора:
M = [r × A] ~ M ⁱʲ = (rⁱAʲ – rʲAⁱ).
Этот факт может говорить о том, что момент является не совсем правильным вектором. Про такие векторы говорю как о псевдовекторах. Правила правильного его преобразования как тензора ранга 2 могут дать неожиданный результат.
В геометрическом смысле "векторное произведение" определяется как некоторая "площадь", построенная на участвующих в произведении векторов:
|M|= |r × A| = |r||A|sin(r, A).
В отличие от скалярного произведения векторов - как проекции одного вектора на другой.
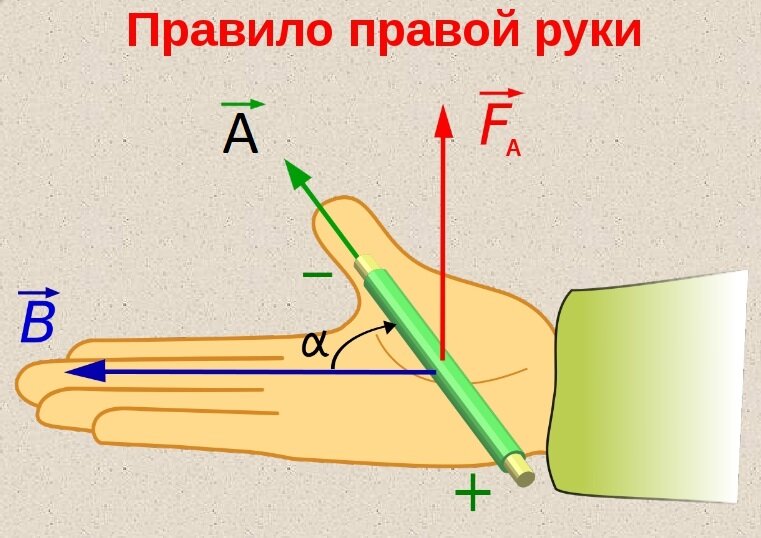
Направление результирующего вектора определяется по правилу буравчика или правилу правой руки. Представьте себе, что большой палец показывает направление первого вектора, а остальные пальцы – второго вектора. Тогда направление результирующего вектора будет направлен из ладони наружу (см. РИСУНОК).
Иногда, точнее – в 4-мерном галилеевом пространстве-времени, удается определить расширение понятия "момент" и по отношению к некоторому "скалярному" параметру. Выше этот случай был зашифрован под свойством "галилеевости". Это возможно, если этот параметр можно интерпретировать как "временной" элемент 4-вектора, которому можно приписать индекс 0. Этот результат будет использован далее по тексту:
M⁰ʲ = (r⁰aʲ – rʲa⁰) = (taʲ – rʲ).
Здесь r⁰ = t – нулевая координата в 4-мерной формулировке пространства-времени,
v⁰ ≡ 1 – скорость по нулевой координатной оси в 4-мерной формулировке пространства-времени: dt/dt ≡ 1.
Свойство, соответствующе зашифровке под свойством "однородность", будет представлен в конце статьи. А теперь приступим к теме, обозначенной заголовком статьи. А именно, рассмотрим моменты скорости, ускорения, импульса и силы. Практическое значение из них имеют последние две.
Моменты скорости и ускорения
Для примера рассмотрим практически не применяемые на практике моменты скорости и ускорения. Момент скорости м.т. vⁱʲ определяется по формуле:
M = [r × v]:
vⁱʲ = (rⁱ × vʲ) = (rⁱvʲ – rʲvⁱ).
Моменту скорости по индексу 0 будет соответствовать "момент"
v⁰ʲ = (r⁰vʲ – rʲv⁰) = (t × vʲ – rj).
Расшифруем ее:
rʲ = (t × vʲ – v⁰ʲ).
Этот результат говорит о том, что м.т. движется равномерно и прямолинейно в течение неограниченного времени. v0j соответствует начальному положению м.т. Это фактически первый закон Ньютона.
Для момента ускорения просто надо заменить параметр скорости v на параметр ускорения w.
Момент импульса
Момент импульса также не является редко применяемым параметром. С ним связан закон сохранения момента импульса замкнутой системы (без доказательства! В этой статье, конечно). И с ним также связан принцип изотропности пространства. Векторный момент импульса определяется как векторное произведение радиус–вектора на импульс м.т. Численно значения элементов этих векторов определяются формулами:
P¹ = p²³ – p³², P² = p³¹ – p¹³, P³ = p¹² – p²¹.
P = [r × p] = [r × mv] = m[r × v].
Как видно, момент импульса равен произведению массы на момент скорости.
Момент импульса аддитивна по материальным объектам системы (без доказательства). Пусть м.т. – составная м.т., p = Sₕpₕ, f = Sₕfₕ. Рассмотрим, как изменяется момент импульса при преобразованиях трансляции:
Здесь P0 – момент импульса с.м.т. как целого с полной массой и импульсом. Из формулы видно, что если p = 0, то момент импульса не зависит от выбора с.о. Для м.т. собственный момент импульса равен нулю, потому что всегда можно найти с.о., в которой для него p = 0. Если м.т. является составной, то условие p = 0 соблюдается для с.о., в которой ц.м. с.м.т. покоится. Этот момент импульса называют собственным моментом импульса м.т. (системы).
Момент силы
С ним связан закон равенства нулю момента силы для взаимодействующих объектов замкнутой системы (без доказательства!). Момент силы определяется как аксиальный векторный параметр (векторное произведение) в 3-мерном пространстве:
F = [r × f].
Рассмотрим, как изменяется момент силы F с.м.т. при преобразованиях трансляции:
Член ∑ₕ[r₀× fₕ] называется трансляционным моментом силы. Из формулы видно, что если f = 0, то момент силы F' не зависит от выбора с.о. Если м.т. является составной, то условие f = 0 соблюдается, если моменты сил, действующие на м.т., взаимно компенсируются. Такое бывает, в частности, если на м.т. взаимодействуют только между собой и не действуют внешние силы. Этот момент силы называют собственным моментом силы м.т. (системы). Он равен нулю:
Последнее верно в силу параллельности векторов силы fₕₖ и линии действия силы (rₖ – rₕ).
В тензорной форме момент силы fij определяется по формуле:
fⁱʲ = m[rⁱ × wʲ] = (rⁱfʲ – rʲfⁱ) = m (rⁱwʲ – rʲwⁱ).
Момент силы связан с массой и моментом импульса по формуле, похожей на второй закон Ньютона:
Под действием этого момента силы м.т. изменяет направление движения, причем зависимо от значения и направления скорости.
По индексу 0, с учетом, что f⁰ = 0, соответствует "момент силы"
f⁰ʲ = m(r⁰ fʲ – rʲ f⁰) = mt f ʲ.
Какой либо реальный смысл в этом параметре как момента силы по индексу 0, видимо, не усматривается. Но само по себе векторное произведение, и ее дополнение по четвертому измерению, широко используются в электродинамике. Вспомните закон Лоренца – силы, действующей на заряженное тело в электромагнитном поле - в электродинамике.
Момент инерции
Момент инерции - еще один пример очень широко используемого в механике "моментного" параметра не точечного (и точечного) объекта. Но к рассматриваемому в статье типу параметров никакого отношения не имеет. Она, во первых, симметрична. Этого уже достаточно.
Объединение параметров м.т. в одной матрице
Все рассмотренные "моментные" параметры м.т. можно объединить в одной 4-мерном антисимметричной матрице:
Здесь элементы с индексом 0 будут определять моменты, связанные с координатой "время" с индексом "0". Эта матрица содержит всего 6 независимых элементов: 3 из них соответствуют пространственным индексам, связанным с традиционным пониманием момента вектора, и еще 3 – пространственно-временным с индексом 0, соответствующим в данной интерпретации "галилееву" моменту.
Формально все 10 параметров, включая и энергию и импульс м.т., можно объединить в 5–мерной матрице, получающейся из предыдущей добавлением еще одной строки и столбца с элементами энергии–импульса м.о. Это будет эквивалентно введению еще одной дополнительной координаты q⁴ (или вообще без индекса как скалярная координата) с движением м.о. в пространственно-временном слое на постоянном единичном расстоянии от базисного пространства–времени: q⁴ = 1. Момент по дополнительной координате будет описываться формулой
pⁱ⁴ – p⁴ⁱ = r⁴pⁱ – rⁱp⁴ = 1× pⁱ – rⁱ × 0 = pⁱ.
что формально полностью совпадает с определением импульса м.т. При этом импульс получает статус момента импульса по дополнительной координате:
Формально P⁴⁰ должен соответствовать энергии м.т. Но есть некоторые сложности в отображении тензорного галилеева пространства в пространство-время механики Ньютона. Но в данной статье я не буду рассматривать эти сложности. Они ведут к достаточно глубоким последствиям для теории. Но в результате (с некоторыми сложностями) мы получили "жизнь на бране" в 5–мерном пространстве.
Мои странички на Дзен: ВАЛЕРИЙ ТИМИН
Ссылка на мою статью Как написать формулы в статье на Дзен?
Если вам понравилась статья, то поставьте "лайк" и подпишитесь на канал! Если не понравилась – все равно комментируйте и подписывайтесь. Этим вы поможете каналу. И делитесь ссылками в ваших соцсетях!
Если хотите узнать, что обозначает слово или словосочетание, в ОПЕРЕ выделите это слово(сочетание), нажмите правую клавишу мыши и выберите "Искать в ...", далее - "Yandex". Если это текстовая ссылка – выделите ее, нажмите правую клавишу мыши, выберите "перейти …". Все! О-ля-ля!