Выводы, полученные на основе проекта TRINA (Tele-Robotic Intelligent Nursing Assistant - Умный телероботический санитар)
Мобильный робот-манипулятор TRINA был разработан при финансировании Национального научного фонда в ответ на вспышку Эболы в 2014 году. Робот был предназначен удаленного выполнения различных рутинных задач медперсонала (доставка еды и лекарств, перемещение оборудования, уборка, мониторинг показателей жизнедеятельности, общение с пациентом).
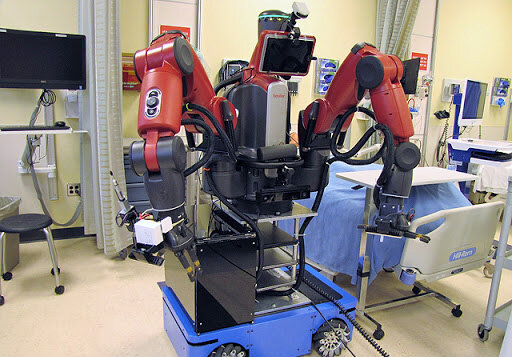
Система прошла многочисленные тестирования в лаборатории и в условиях, имитирующих клинические (декорации больничных кабинетов и профессиональные актеры, используемые при обучении медсестер). В качестве операторов для робота использовали как опытных «пилотов», так и обученных медсестер. В настоящее время существует три версии TRINA:
- оригинал в Университете Дьюка,
- робот в Вустерском политехническом институте,
- TRINA 2.0, разрабатываемый в Университете Иллинойса в Урбане-Шампейне.
Прямая телеоперация vs супервизорный контроль
Одним из уникальных аспектов дистанционного ухода за пациентами является то, что медики, не являющиеся экспертами в робототехнике, могут использовать сложные роботические технологии в стрессовых и требующих максимальной оперативности ситуациях в течение продолжительного времени. Следовательно, при разработке подобных технологий удобство, интуитивное управление и эргономичность пользовательского интерфейса являются первостепенными задачами. Интересно, что существует два противоположных пути к решению этих задач. В телероботической литературе это явление называется спором между прямой телеоперацией и супервизорным контролем.
Суть парадигмы прямой телеоперации состоит в том, чтобы предоставить оператору “живой” опыт, сделать робота органичным продолжением человека. Однако первые эксперименты на TRINA показали, что трансляция движений человека роботу может быть неоднозначной и требует серьезного обучения. В частности, сложной задачей стала трансляция движения захвата роботу - рефлекты робота были заторможенными из-за задержек сенсомоторного контроля. В проведенных тестах обученный оператор, использующий робота, был в 50-150 раз медленнее при выполнении рутинных задач, чем медсестра, носящая СИЗ.
Отметим, что данная задача была блестяще решена в технологии da Vinci. Подробнее о хирургическом роботе читайте в материале.
Парадигма супервизорного управления, напротив, ставит оператора в роль супервизора над полуавтономным роботом. Оператор выдает команды, отслеживает прогресс и иногда вмешивается. Например, медсестра может использовать интерфейс «наведи и щелкни», чтобы направлять робота к цели, захватывать предметы и использовать их. Таким образом, даже если робот работает медленно, оператор использует лишь малую часть своего внимания. Большую часть времени он может свободно выполнять другие задачи, включая управление несколькими роботами одновременно.
Также исследуются методы помощи оператору, которые дополняют прямой контроль некоторой автономностью. Роботы напоминают о продвинутых функциях транспортной безопасности, например, предупреждая о столкновениях, а также помогают при манипуляциях, таких как «автозахват». Возможно, небольшая помощь, надлежащим образом адаптированная к ситуации, сможет сделать выполнение теле-манипуляций более удобными и органичными.
Средства индивидуальной защиты для роботов
Создатели TRINA понимали важность поддержки обратной связи с конечным пользователем робота (медсестрами) даже на начальных этапах разработки. Удивительно, но одной из самых востребованных функций робота у медсестер стала функция выключения систем оповещения аппаратуры. Ложная тревога срабатывает практически ежедневно, что затрудняет работу медперсонала. Однако ситуация становится невыносимой, когда медработнику приходится надевать СИЗ для того, чтобы нажать одну кнопку. Робот может дать возможность удаленной проверки подключений всех систем жизнеобеспечения. Если ложный сигнал подтвержден, робот самостоятельно отключает систему оповещения. Такая разработка может существенно облегчить работу медиков.
Актуальной проблемой использования робота в стерильных условиях стала дезинфекция: установку необходимо очищать после каждого пациента, а также по окончание смены. Однако наличие электроники, уплотнений соединений, вентиляционных отверстий и колес, используемых в большинстве роботов, затрудняют тщательную очистку. Для решения проблемы были разработаны одноразовые СИЗ, совместимые с датчиками и соединениями робота. Такие СИЗ можно безопасно надевать и снимать, а саму процедуру смены СИЗ в будущем автоматизировать при помощи робота.
Отметим, что одноразовые чехлы также используются для обеспечения стерильности хирургического робота da Vinci. Подробную информацию читайте по ссылке.
Робот - мощное средство в борьбе с пандемией
Пандемия Covid-19 вызвала новый интерес к телероботическим системам, которые могут оказывать помощь на расстоянии. Помимо обеспечения безопасности сотрудников клиник и сокращения использования СИЗ, роботы-медсестры могут иметь следующее применение:
- лечение пациентов с ослабленным иммунитетом (в чистую зону к таким пациентам приставляют специального робота, который выполняет все необходимые манипуляции, не взаимодействует с внешним миром и никогда не устает);
- улучшение доступа к медицинским услугам в сельских районах (разработка поможет жителям удаленных районов получить срочную узкоспециализированную помощь);
- оказание помощи пожилым людям (уход за пожилыми людьми может облегчить робот-сиделка. Члены семьи или медсестры смогут управлять роботом удаленно и оказывать ежедневную и срочную помощь. Разработка особенно актуальна для жителей удаленных районов, куда не может проехать скорая).
В настоящее время телероботическая технология не идеальна. Для решения оставшихся проблем удобства использования, надежности, клинической интеграции потребуются согласованные усилия ученых, инженеров и медицинских работников. Однако получившаяся технология может стать мощным механизмом для борьбы с пандемией и обеспечения безопасности сотрудников медицинской сферы.