Дрон с ногами наконец-то научился ходить — большое событие для мировой науки. Чтобы увеличить количество людей, которые могут об этом почитать, мы перевели на армянский эту новость.
Сделали это мы для проекта «Языки России», который ведем при поддержке АНО «Институт развития интернета». На всякий случай напомним, что армянский — десятый по количеству говорящих на нем в России. Этим языком, по данным переписи 2010 года, владеют 660 тысяч человек.

Ռուս և ղազախ ինժեներները վարժեցրել են ոտքերով դրոնին, որը կարող է վայրէջք կատարել անհարթ մակերեսների վրա, քայլել նրանց վրա:
Մշակումը թույլ կտա օգտագործել դրոները երկրաշարժի փրկարարական աշխատանքների ժամանակ, կամ այլ անհարթ ռելիեֆ ունեցող տարածքներում, պատմում են IEEE Journal on Miniaturization for Air and Space Systems-ում տեղադրված հոդվածի հեղինակները:
Ռոբոտի մշակման ժամանակ ինժեներները սովորաբար կառուցվածքն ընտրում են` ելնելով այն խնդիրներից, որոնց հետ ապագայում կառնչվեն:
Եթե ռոբոտը պետք է շարժվի համեմատաբար հարթ մակերեսի վրա, ապա առավել արդյունավետ է օգտագործել անիվներ: Բարդ և բազմաթիվ փոքր բարձունքներ ունեցող ռելիեֆի համար ավելի օպտիմալ են քայլող կամ սողացող ռոբոտները: Իսկ լեռնային տարածքների համար միայն օդանավն է հարմար, բայց թռիչք կատարելու հնարավորության դիմաց ինժեներները ստիպված են համակերպվել սարքի շահագործման կարճ ժամանակահատվածի հետ:
Երկար տարիներ տարբեր կազմակերպությունների ինժեներներ աշխատում են հիբրիդային ռոբոտների վրա, որոնք համատեղում են թռչելու և գետնի վրա արդյունավետ տեղաշարժվելու ունակությունները: Այս մշակումները դեռ նախատիպի փուլում են և գործնականում գրեթե երբեք չեն կիրառվում, իսկ նրանց հիմնական կառուցվածքը բաղկացած է անիվային ռոբոտի և բազմակոպտերի համադրությունից, ընդորում ինչպես մեկ օբյեկտի տեսքով, այնպես էլ երկու ռոբոտների:
Skoltech-ի Դմիտրի Տետերյուկովի (Dzmitry Tsetserukou) գլխավորած ինժեներները ստեղծել են ոտքերով դրոն, որը վայրէջքից հետո կարող է կանգնեցնել պտուտակները և արաջ շարժվել քայլերով: Անօդաչուն ինքնին մշակվել է որպես մեկ այլ աշխատանքի մի մաս 2018-ին, երբ ինժեներները ստեղծում էին բազմակոպտեր, որը կկարողանա վայրէջք կատարել անհավասար մակերեսների վրա: Այն հիմնված է DJI F550 շրջանակի վրա ՝ NAZA-M թռիչքի կարգավորիչով, իսկ կորպուսի ստորին հատվածում հեղինակները տեղադրել են չորս ոտք: Նրանք հավաքվում են երկու երկար հատվածներից և մեկ կարճ «ներբանից»: «Ազդրի» և «ծնկի» հատվածներում սեկցիաները միացված են ոլորող մոմենտին սերվոմոտորների միջոցով, իսկ «ներբանի» վերևում գտնվում է պասիվ հոդ:
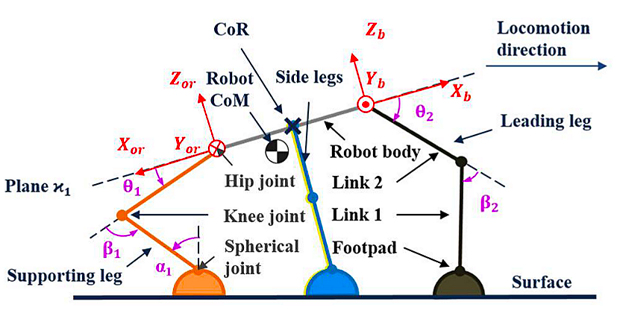
Հեղինակները ռոբոտի համար մշակել են քայլելու ռեժիմ, որը համեմատում են կոտրված ոտքով հենակներով քայլող մարդու քայլվածքի հետ: Այդ ռեժիմի ժամանակ ռոբոտը կանգնում է երկու հակառակադիր ոտքերով՝ քայլելու ուղղությամբ: Այնուհետև նախ ետ է թեքվում, առաջ շարժում առջևի ոտքը և փոխանցում զանգվածների կենտրոնը, իսկ հետո, ընդհակառակը, առաջ է կռանում և ձգում հետևի ոտքը: Զանգվածների կենտրոնը փոխանցելուն զուգահեռ շարժվում են կողային ոտքերը: Այս ռեժիմի ժամանակ բոլոր ոտքերը շարժվում են պարաբոլիկ հետագծերով՝ ինչը օգնում է հաղթահարել խոչընդոտները:
Ինժեներները փորձարկեցին ալգորիթմի աշխատանքը ռոբոտի վրա և պարզեցին, որ ամենաարդյունավետ տարբերակը ոտքերը տեղափոխելն է այնպես, որ զանգվածի կենտրոնը տեղաշարժվի ցիկլոիդային հետագծի երկայնքով: Նրանք նաև ստուգել են ռոբոտի շարժումների ճշգրտությունը՝ տալով նրան տրված հետագծով շարժվելու հրաման և համեմատելով արդյունքները հաշվարկների հետ: Փորձարկումները ցույց տվեցին, որ քայլքի երկարության ճշգրտությունը (ստանդարտ շեղումը) հասնում է 9,8 միլիմետրի (վեց սանտիմետր քայլքի երկարության դեպքում), իսկ ուղղության երկայնքով հետևելու ճշգրտությունը ինը աստիճան է:
Դրոնի մեկ այլ առանձնահատկությունն է անհավասար և թեք մակերեսների վրա նստելու կարողությունը՝ օգտագործելով ոտքերը անկյան տակ: Վերջերս նաև կանադացի ինժեներները սովորեցրին դրոնը նստել թեք տանիքի վրա, բայց այլ կերպ: Մակերեսին դիպչելուց անմիջապես հետո դրոնը միացնում է ռեվերսային քարշուժ և սեղմում է իրեն մակերեսին՝ առաջին շփումից հետո բարձր ցատկումից խուսափելու նպատակով:
Թարգմանել է Էլեոնորա Սարգսյանը: