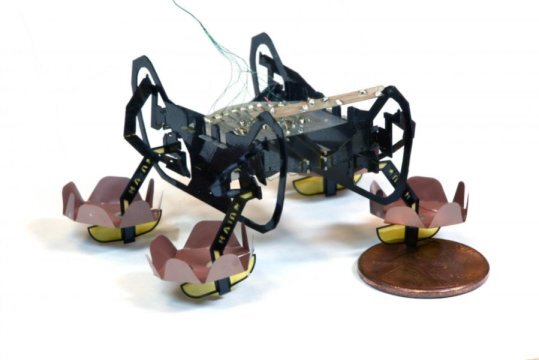
В природе тараканы могут выживать под водой в течение 30 минут. Теперь робот-таракан может сделать еще лучше. Амбулаторный микроробот Гарварда, известный как HAMR, может ходить по земле, плавать на поверхности воды и ходить под водой столько, сколько необходимо, открывая новые условия для этого маленького бота, чтобы исследовать.
Это новое поколение HAMR использует многофункциональные подставки для ног, которые полагаются на поверхностное натяжение и поверхностное натяжение, вызванное плавучестью, когда HAMR нужно плавать, но также может применять напряжение, чтобы сломать поверхность воды, когда HAMR нужно утонуть. Этот процесс называется электропроводящим, что является уменьшением угла контакта между материалом и поверхностью воды под приложенным напряжением. Это изменение угла контакта облегчает разрушение объектов водой.
Движение по поверхности воды позволяет микророботу уклоняться от подводных препятствий и уменьшать сопротивление. Используя четыре пары асимметричных закрылков и специально разработанные плавательные походки, HAMR robo-paddles на поверхности воды плавают. Используя нестационарное взаимодействие между пассивными клапанами робота и окружающей водой, робот генерирует плавающие походки, подобные плавучим жукам. Это позволяет роботу эффективно плавать вперед и поворачиваться.
«Это исследование демонстрирует, что микророботы могут использовать мелкую физику - в данном случае поверхностное натяжение - для выполнения функций и возможностей, которые сложны для более крупных роботов», - сказал Кевин Чен, постдоктор в школе Гарварда Джона А. Полсона Инженерных и прикладных наук (SEAS) и первого автора статьи.
Последние исследования опубликованы в журнале Nature Communications.
«Размер HAMR является ключом к его производительности, - говорит Нил Доши, аспирант SEAS и соавтор статьи. «Если бы это было намного больше, было бы сложно поддерживать робота с поверхностным натяжением, и если бы он был намного меньше, робот, возможно, не смог бы создать достаточную силу, чтобы сломать его».
HAMR весит 1,65 грамма (примерно столько же, сколько большая скрепка), может нести 1,44 грамма дополнительной полезной нагрузки без погружения и может грести ноги с частотой до 10 Гц. Он покрыт париленом, чтобы он не загорелся под водой.
Как только под поверхностью воды, HAMR использует одну и ту же походку, чтобы ходить, как на суше, и так же мобильна. Чтобы вернуться в сушу, HAMR сталкивается с огромной проблемой из удержания воды. Сила натяжения поверхности воды, которая в два раза превышает вес робота, толкает робота, и, кроме того, индуцированный крутящий момент вызывает резкое увеличение трения на задних лапах робота. Исследователи усилили передачу робота и установили мягкие подушечки на передние ноги робота, чтобы увеличить грузоподъемность и перераспределить трение во время лазания. Наконец, поднимаясь по скромному уклону, робот может вырваться из удержания воды.
«Этот робот хорошо иллюстрирует некоторые проблемы и возможности с помощью небольших роботов», - сказал старший автор Роберт Вуд, профессор технических наук и прикладных наук Чарльза реки в SEAS и главный преподаватель Института Гарвардского университета в области биологически вдохновленной инженерии. «Сокращение открывает возможности для повышения мобильности - например, прогулки по поверхности воды, - но также и проблемы, поскольку силы, которые мы считаем само собой разумеющимися в больших масштабах, могут начать доминировать над размером насекомого».
Затем исследователи надеются еще больше улучшить локомотив HAMR и найти способ вернуться на землю без рампы, возможно, включив гекко-вдохновленные клеи или импульсные механизмы прыжков.
Это исследование было соавтором Бенджамина Голдберга и Хунцзян Ванга. Он был поддержан Школой инженерных наук и прикладных наук Гарварда Джона А. Полсона, Институтом биологического вдохновения в Виссе и Программой научно-исследовательского инструментария Управления военного университета Министерства обороны.
Ю