Поклонникам роботов в виде насекомых, вероятно, понравятся такие создания, как RoboBee, VelociRoACH, а также HAMR из Гарвардского университета. Последний из них теперь может не только передвигаться по воде, но и, погружаясь в нее, перемещаться под водой по командам оператора.
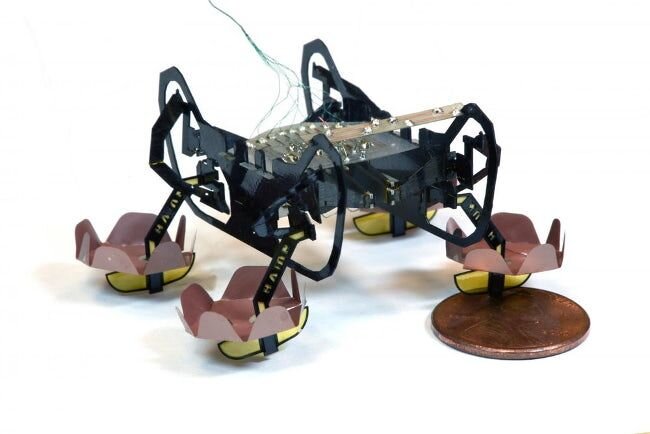
Впервые анонсированная в 2013 году, оригинальная версия робота HAMR (Harvard Ambulatory MicroRobot) управлялась и питалась по кабелю. При длине всего 4,4 см робот мог перемещаться по земле с максимальной скоростью 8,4 длины тела в секунду.
Последняя версия HAMR весит всего 1,65 грамм и оснащена медными «подушечками» на всех четырех ногах, которые обеспечивают роботу плавучесть за счет поверхностного натяжения воды. Удерживаясь на водной поверхности, робот даже может нести полезную нагрузку в 1,44 грамма. Используя лопатки на нижней части подушечек, он может перемещаться по воде, двигая ногами с частотой до 10 Герц.
Медные платформы нужны роботу не только для перемещений по поверхности воды. После приложения напряжения в 600 вольт к металлическим платформам на ногах робота их угол смачивания меняется, поверхностное натяжение воды разрывается, и робот тонет. Под водой он может ходить по дну, используя те же движения, что и на земле.
Когда приходит время, чтобы выбраться из воды, крошечному, легкому роботу нужно помочь вырваться обратно через ту же поверхность, которая ранее держала его на плаву. Для этого HAMR имеет более жесткую передачу вместе с мягкими подушечками на передних ногах, которые вместе служат для увеличения его полезной нагрузки и распределения трения при подъеме из-под воды по наклонной плоскости.
В будущем разработчики рассматривают возможности применение технологий прилипания ног к поверхности (как у гекконов) или механизмов прыжка, чтобы робот мог выбраться из воды без использования пандуса.
Понравился пост? Ставьте лайк и подписывайтесь на наш канал, чтобы следить за технологиями будущего!