Количество людей, нуждающихся в помощи после перенесённого инсульта или по причине инвалидности, не уменьшается. Новые технологии, в том числе и роботизированные, — это отличный способ помочь людям с ослабленными мышцами или другими проблемами передвижения вести свой обычный образ жизни.
Исследовательская группа под руководством профессора Минору Хашимото из Университета Шиншу в Японии опубликовала статью, в которой раскрыты детали прототипа искусственных мышц. Исследователи отмечают, что зачастую устройства, предназначенные для помощи человеку с процессом ходьбы, довольно громоздки, поэтому необходимо изобретение лёгких, мягких и при этом достаточно износоустойчивых материалов.

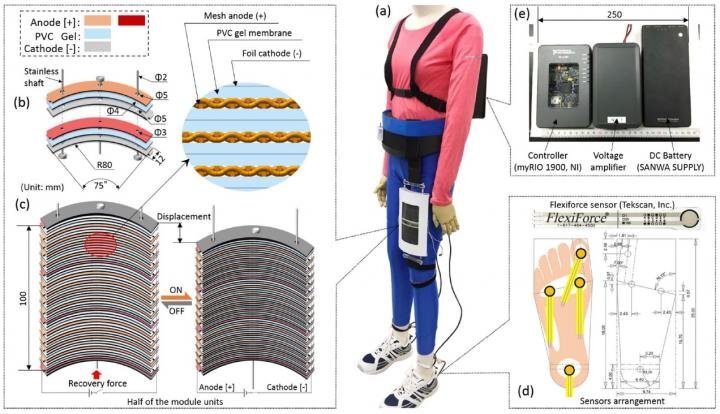
Система состоит из пластифицированного геля поливинилхлорида (ПВХ), сетчатых электродов, к которым подведено напряжение. Электроды пронизывают гель, и когда на них подаётся напряжение, гель сгибается как мышца. Возможность работы с ПВХ-гелем особенно привлекательна для обеспечения высокоскоростного движения, как отмечает профессор Хашимото.
В предварительном эксперименте пациент, перенёсший инсульт, выполнял десятиминутное упражнение (ходьба вперёд и назад по прямой линии) без вспомогательного механизма и с ним. Было обнаружено, что механизм обеспечивал естественность передвижения, увеличивая длину шага и уменьшая мышечную активность. Эффект при этом может быть скорректирован путём контроля времени включения-выключения мягких приводов.
Роботизированная система заняла первое место при демонстрации на 24 Международном симпозиуме по интеллектуальным структурам и материалам, неразрушающей оценке и мониторингу здоровья.
Исследователи планируют создать струнный механизм с использованием ПВХ-геля. Это потенциально может помочь в разработке ткани, способной обеспечить более лёгкое управление системой.
Надо отметить, что тема разработки искусственных мышц довольно актуальна в современной науке. Так в 2016 году американские учёные уже разработали мягкий привод для роботов. Созданный ими актуатор имел ячеистую структуру, полости которой были соединены с вакуумным насосом, который заставлял всю конструкцию сокращаться подобно настоящей мышце.