Глаза роботов: часть 1. Ультразвук
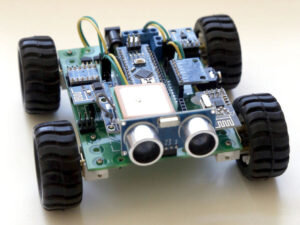
Разве не прекрасно, когда твой робот сам находит дорогу? Подарить зрение своему железному другу сегодня не сложно. Плата с двумя серебряными цилиндрами, которые напоминают левый и правый глаз — ультразвуковой дальномер HC-SR04. Датчик является скорей “ртом и ухом”, но человеческому восприятию не прикажешь. Инженеры любят этот датчик за его простоту и стоимость — всего 50 рублей в китайском онлайн магазине.
Как работает эта штука?
Левый цилиндр – передатчик, а правый – приёмник. Передатчик издаёт неслышимый человеку звук с частотой выше 20 килогерц, называемый ультразвуком. Ультрозвуковая волна, наткнувшись на твёрдый объект, отражается и летит в обратную сторону, где её уже активно слушает приёмник – правый глаз.
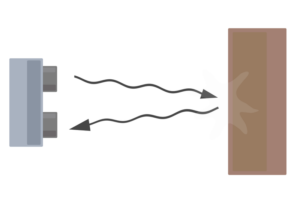
Умная микросхема самостоятельно проводит необходимые преобразования и в результате сигнализирует о расстоянии между “глазами” и объектом.
Пример рассчётов
В основе работы преобразований лежат физические свойства ультразвука. Учёные давно выяснили, что ультразвук распространяется по воздуху со скоростью 340 метров в секунду. Значит 0,034 сантиметра в микросекунду. Допустим отправленный передатчиком звук пришёл на приёмник через 588 микросекунд. Всё это время звук шёл до объекта, затем отразился и вернулся к приёмнику, то есть прошёл два одинаковых расстояния. Значит, если мы возьмем половину времени (588 делим на 2) — 294 микросекунды и умножим на скорость ультразвука 0,034 сантиметра в микросекунду (вспоминаем формулу со школьной программы S = t * v), то получим 9,996 сантиметра. Значит, наш объект находится на расстоянии 10 сантиметров от датчика.
Датчик хорошо справляется с обнаружением небольших объектов на близких дистанциях до 50 сантиметров. Если ваша задача не дать роботу врезаться в стену, то узнать о приближении к стене робот сможет практически на расстоянии 4-5 метров.
Интересные проекты с HC-SR04
Проект “радара” (на самом деле это не радар, а сонар) от Dejan Nedelkovski http://howtomechatronics.com/projects/arduino-radar-project/
На кикстартере нашёл в архивах успешно завершённый проект Hexy – шестиногий робот от Аrcbotics.
Горный лазутчик от ncoonrod14
Ссылка на проект http://robotshop.com/letsmakerobots/rock-crawler
Присылайте нам свои проекты с использованием HC-SR04 на therobot.ru@gmail.com – мы расскажем о них.
Нюансы
Ультразвуковой (УЗ) датчик может выдавать совсем не те значения, которые вы от него ждёте. Такое происходит из-за различных “помех”. Например, если робот посмотрит на покрытую ковролином поверхность, то вполне возможно он не увидит ничего. Звук будет поглощаться и приёмник ничего не услышит.
Кстати, УЗ-детекторы часто используют для контроля уровня жидкостей в резервуарах, потому что звуковые волны отлично отражаются от поверхности жидкости. Чем меньше жидкости, тем большее расстояние проходят ультразвуковые сигналы. Так вот, если на поверхности жидкости сильное волнение, то датчики могут врать.
По ссылке таблица, в которой компания Pepperl+Fuchs показывает степень ослабления сигнала в зависимости от объекта и условий измерения для своей линейки ультразвуковых датчиков.
Я задался вопросом, для каких ещё задач используют УЗ-датчики? Вот что обнаружил:
- Подсчёт объектов, проходящих мимо
- Уровень жидкости / сыпучих материалов
- “Размотанность” рулона (чем меньше рулон в диаметре, там дальше поверхность от датчика)
- Прогиб натянутых лент
- Контроль смещения краев чего либо
- Контроль качества (если знаем как отражает качественная поверхность и некачественная)
- Контроль сближения
- Любых других задач, где отражение или пропускание ультразвука может быть индикатором
Подробнее о задачах можно прочитать тут http://snt.mega-sensor.ru/typical-problems-solved-ultrasonic-sensors.html
В следующей части я расскажу об инфракрасных детекторах. Они работают в невидимом для человека спектре света, и по праву могут называться “глазами” робота.
Изображения взяты с: dx.com, zdnet.com, education.rec.ri.cmu.edu, Dejan Nedelkovski Youtube Channel, letsmakerobots.
Автор: Максим Костерин
Привет, это редакция канала the Robot. Если тебе понравилась эта статья или тематика нашего канала – нажми лайк и подпишись, чтобы не пропустить новые материалы.
Новости о роботах и ИИ теперь можно читать там, где тебе удобно, присоединяйся!
Наш telegram канал : https://t.me/robotics_channel
Наш сайт: https://the-robot.ru/