Большинство четвероногих роботов, созданных на сегодняшний день, рассчитывают каждый свой шаг исходя из информации о предыдущих шагах и просто останавливая движение ноги при соприкосновении с поверхностью. Это никак не может уберечь дорогостоящие конструкции от падения в яму или провала в узкую щель на дороге.
Более совершенные роботы опираются на данные визуальных датчиков, но они рассчитывают шаг перед тем, как его сделать. В случае, если во время самого шага такого робота толкнуть, он, скорее всего, неминуемо упадет.
Решение этой проблемы представили на конференции IROS 2018 инженеры из Итальянского технологического института и Оксфордского университета. Разработчики сосредоточились на создании алгоритма, который позволил бы роботу планировать свои шаги с учетом визуальных данных в реальном времени. Т. е. робот сможет моментально отреагировать и перестроить шаг при неожиданном внешнем воздействии.
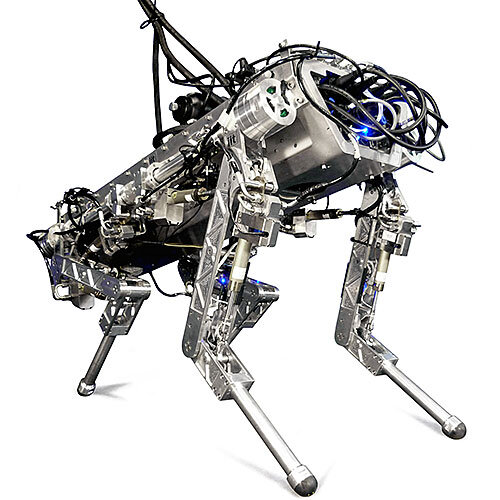
Система была установлена на HyQ — четвероногого робота с большим количеством датчиков (лидары, камеры глубины, датчики положения каждого сегмента ног, гироскоп, акселерометр и др.), данные от которых поступают в режиме реального времени в нейросеть, отвечающую за планирование движений. Исходя из полученной информации, алгоритм делит пространство перед роботом на сегменты, в которые можно наступить, и те, в которые нельзя, постоянно перестраивая эту карту с учетом текущего положения робота.