Причем система позволяет получать и обратную связь.
Группа инженеров из Института Науки и Технологий Сколково под руководством Дмитрия Тетерюкова представили на конференциях IROS 2018 и Data & Science систему управления роем из нескольких квадрокоптеров с помощью движения рук. Практическое применение технологии — проведение роя дронов через огороженные трассы, населенные пункты с большим количеством высотных зданий и сооружений.
Существующие системы управления роем дронов основаны на заранее написанных программах движения или динамическом управлении компьютерной системы. Но для решения некоторых задач было бы удобнее применять ручное управление, что сложно из-за необходимости отслеживания положения нескольких объектов одновременно. Для этого и была разработана перчатка для управления дронами.
Для демонстрации работы системы были выбраны небольшие исследовательские дроны Crazyflie 2.0, на которые установили визуальные светоотражающие маркеры. Это помогло отслеживать перемещение дронов и руки пользователя с помощью высокоскоростных камер.
Алгоритм управления роем дронов с помощью движения рук основан системе виртуальных пружин, когда дроны как бы связаны между собой и с рукой пользователя. Также система отслеживает препятствия и не дает столкнуться с ними дронам.
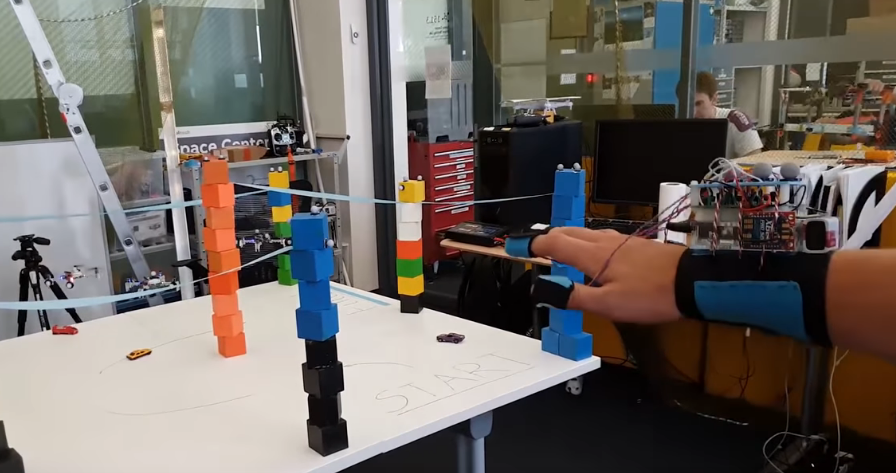
Перчатка для управления состоит из запястной манжеты с источником питания и управляющей платой Arduino, а также пяти манжет для пальцев с вибромоторами. Каждый дрон в группе следует за движениями руки в перчатке, позволяющей ощущать состояние роя через вибрацию, повторяющую движения дронов. Когда рой разлетается, вибрационные импульсы перемещаются от области среднего пальца к боковым. Когда рой группируется плотнее, все происходит в обратном порядке.