В 1958-м году в ходе Второго кризиса в Тайваньском проливе впервые в воздушном бою истребителями ВВС Тайваня была применена ракета AIM-9B, принятая на вооружение США двумя годами ранее, обладавшая возможностью самостоятельно наводиться на горячий след от истекающих из сопла самолёта газов. Именно эта ракета стала первой в мире серийной управляемой ракетой воздух-воздух (УРВВ) с тепловой головкой самонаведения (ГСН).

Из фрагментов ракет, обнаруженных в Китае после этих боёв и доставленных в том же году в СССР, советским конструкторам удалось воспроизвести американскую новинку в ракете К-13, которая была принята на вооружение под индексом Р-3С (самонаводящаяся) всего два года спустя - в 1960-м году. Всё следующее десятилетие эти ракеты и их модификации были главными средствами ведения воздушного боя, а современные модификации AIM-9 и сейчас стоят на вооружении многих стран. Также тепловые головки самонаведения появились и на других ракетах воздух-воздух и многих зенитных ракетах малой дальности.
Но во всей этой истории, думаю, многих интересует, а каким образом в далёких пятидесятых удалось реализовать принцип самонаведения ракеты. Собственно, технической стороне вопроса и посвящена эта статья.
Для начала немного совсем базы. Тепловая ГСН наводится на излучение горячих газов, исходящих из сопла двигателя, в инфракрасном диапазоне электромагнитного спектра.
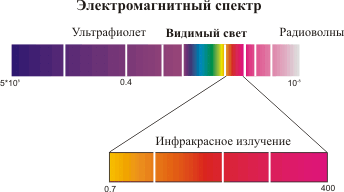
В этом диапазоне человеческий глаз уже не видит, однако он всё ещё очень близок к видимому свету, а потому прост и понятен. Военные очень любят этот диапазон: именно в нём нагретые объекты излучают свет во всем промежутке температур, который им интересен - от раскаленных газов, истекающих из сопла двигателя, до разогретых от долгой езды гусениц танка.
Вообще говоря, в разных ракетах ГСН устроены по разному, но нас интересует общая идея, поэтому возьмём наиболее простой вариант.
Всю систему можно разделить на три основных части, которые последовательно проходит лучистая энергия, излучаемая горячими частями двигателя и газами, после попадания на прозрачный обтекатель ГСН:
- оптическая система из линз и зеркал;
- модулирующая система;
- приёмник излучения (фотосопротивление или болометр).
Чтобы было проще и интереснее, начнём с последнего. Вопреки интуиции и нашему опыту приёмник состоит всего из одного светочуствительного элемента, который функционально можно описать так: если свет на него падает, то ток в сети есть; если света нет, то и тока не будет. Если немножечко уточнить идею, то получится еще правильнее: чем больше света попадёт на приёмник, тем больше тока в сети.
И тут возникает правильный вопрос: а каким образом происходит тогда самонаведение, если мы можем регистрировать только наличие или отсутствие излучения от двигателя на приёмнике?
Задача определения положения цели относительно продольной оси ГСН в первую очередь ложится на модулирующую систему: кто понимает, как она работает, тот понимает, как работает тепловая ГСН.
Модулирующие системы отличаются широчайшим разнообразием вариантов, мы же рассмотрим самую простую и наглядную. Подавляющее большинство таких систем представляет из себя комбинацию вращающихся модулирующих дисков: выполненных из стекла или пластика штуковин, на которых непрозрачной краской нанесён определенный узор (или вырезан, если диск непрозрачный).
При вращении этого диска пятно от излучения двигателя попеременно то попадает на приёмник, то нет, задерживаясь на непрозрачной части модулирующего диска.
Исполнив на диске замысловатый узор, мы, чисто теоретически, в зависимости от того, сколько на приёмник попадает света и как часто это происходит, можем понять, на какую часть диска попало пятно от теплового следа двигателя.
Рассмотрим схему д) с верхней картинки. Тепловое пятно двигателя фокусируется оптической системой на небольшую площадку на пересечении двух дисков - на картинке эта площадка подписана цифрами (2+3, 1+3, 2+4, 1+4). Каждый диск имеет такой узор, чтобы частоты насечек на внешней и внутренней части (1, 2) одного диска не совпадали, как между собой, так и с частотами на втором диске (3, 4). В итоге, на пересечении получается четыре площадки, на которых частота попадания света на источник будет складываться из частот насечек на внешних и внутренних радиусах диска, что собственно и нарисовано в виде вышеупомянутых сумм (2+3, 1+3, 2+4, 1+4) на картинке.
Таким образом, мы получаем модулирующую систему, которая на выходе даёт одну из четырёх определенных частот попадания света на приёмник (одна частота означает, что цель справа, другая - снизу и так далее). Далее дело за несложной электронной системой, которая с помощью четырёх фильтров частоты (устройств, которые пропускают ток исключительно определенной частоты) будет подавать напряжение на двигатели, управляющие рулями ракеты.
И последним элементом всего этого действа является оптическая система. Хорошим вопросом будет следующий: зачем она нужна, если можно без всяких зеркал и линз с помощью модулирующих дисков понять, где находится цель. И правильным ответом будет следующий:
Чувствительные элементы приемников излучения, используемых в тепловых головках самонаведения, обычно весьма малы, что необходимо для повышения чувствительности. Отношение площади входного отверстия -оптической системы к площади чувствительного элемента приемника определяет оптическое усиление системы. Чем больше оптическое усиление, тем меньше облученность входного отверстия оптической системы, при которой еще возможно наведение, и, следовательно, тем больше дальность поражения цели.
Простыми словами, оптическая система выполняет роль телескопа, чтобы ГСН могла увидеть те "звёзды", которые "невооруженным глазом" не увидеть.
В общем, вот такой несложный принцип получился и впоследствии нашёл своё применение не только в самонаводящихся ракетах и не только в инфракрасном диапазоне.
Например, ГСН зенитной ракеты 9М31 из комплекса "Стрела-1" построена по тому же принципу, однако наводится на фотоконтрастные цели - силуэт самолёта или вертолёта на фоне неба или облаков. Это позволило наводиться не только на тепловой след двигателя, но и на весь самолёт в целом с любого ракурса. Впоследствии головки самонаведения стали охлаждать, снижая шум от собственного излучения, что давало возможность наводиться не только строго сзади в сопло, на раскаленную турбину, но и на сами горячие газы уже позади двигателя. То есть уже с достаточно больших ракурсов. Глубокая заморозка ГСН позволила добиться всеракурсности ракеты - возможности захватывать даже разогретую трением обшивку самолёта, что радикально повысило боевые возможности самолётов, вооруженных такими ракетами.
Появление ракет с тепловой ГСН также вынудило искать способы борьбы с ними. Самым простым и понятным было создание ложных тепловых целей (ЛТЦ), чтобы ракета наводилась на них и уходила от цели. В ответ сначала вводилась селекция по температуре (ЛТЦ поначалу были заметно горячее), потом начали добавлять дополнительный приёмник в другом диапазоне (фотоконтрастный либо ультрафиолетовый), а на новейшие западные ракеты вообще начали ставить матричные ГСН, работающие на несколько другом принципе.
В восьмидесятых годах на советских и штатовских вертолётах обосновались станции оптико-электронного подавления (СОЭП) "Липа" и AN/ALQ-144.
Принцип работы таких станций тоже не отличается сложностью: по сути это большой инфракрасный фонарь, мигающий с быстро меняющейся частотой. В зависимости от вида модулирующего диска будет меняться и воздействие на систему управления. Для разобранной выше системы с фиксированными частотами будет происходить следующее: при каждом совпадении частоты мерцания с одной из управляющих частот, ГСН будет реагировать уходом в сторону, соответствующую частоте помехи. Даже если это не уведёт ракету от цели, то заметно расшатает траекторию, сократив, таким образом, дальность, а на заключительном этапе настолько увеличит промах, что радиовзрыватель ракеты либо не сработает, либо сработает на таком удалении, что боевая часть практически не причинит ущерба вертолёту. Впрочем, если управляющие частоты ГСН становятся известны (после изучения трофейных образцов, например), то СОЭП можно настроить на них таким образом, чтобы ГСН постоянно воспринимала мерцание, как одну из команд (например, "вверх") и сразу же уходила в сторону от цели.
Для вариантов модулирующих дисков, где используются целые диапазоны частот (для более плавного наведения), ситуация становится еще более критичной.
И последней интересной деталью всего этого рассказа станет упоминание о противотанковых ракетных комплексах (ПТРК). Первые системы с противотанковыми управляемыми ракетами (ПТУР) работали достаточно просто: оператор производил пуск ракеты, в хвосте которой горел пиротехнический трассер (как те, что горят в трассирующих пулях и снарядах), следя за которым, оператор наводил ракету по проводам с помощью джойстика, удерживая этот самый трассер в силуэте цели. Этот процесс был достаточно сложным, неудобным и ненадёжным: поражение движущихся целей, разумеется, было серьёзно затруднено, а от оператора требовались высокая выучка и мастерство. Нужна была система, позволяющая в автоматическом режиме отслеживать положение трассера относительно оси прицела и по этим данным управлять ракетой. Уже догадываетесь, что было придумано?
На ПТРК нового поколения стали устанавливать такую же систему с модулирующими дисками, которая выдавала на ракету сигналы таким образом, чтобы при отклонении от точки прицеливания она возвращалась к оси прицела, который удерживался оператором на цели. Такие системы наведения были применены во многих ПТРК: 9К111 "Фагот", 9К112 "Кобра", 9К113 "Штурм", BGM-71 TOW, HOT, Milan и там ещё целый список, который я после написания стёр, чтобы не замыливать глаза читателю.
Пуск ПТРК "Фагот", видно, как система возвращает отклоняющуюся ракету.
С появлением (а точнее даже с некоторым опережением) танковых СОЭП типа "Штора-1", работавших наподобие "Липы", встал вопрос о защите от помех таких систем наведения. В том числе защиты от помех и самих команд, передаваемых по радио, посредством которого управлялись вертолётные и танковые ПТУР. Таким образом, появилась новейшая система наведения, которая практически всем превосходила предыдущую. И тут опять не обошлось без параллели с главным объектом нашей статьи.
Всю схему развернули задом наперёд. Трассер был заменён лазером с широким полем, устанавливался уже не на ракете, а на пусковой установке - перед модулирующими дисками. А вот приёмник с демодулятором (общее название систем, одну из которых мы разобрали выше - та, что с фильтрами) находятся в хвосте ракеты. Таким образом установка светила ей во след, а ракета ориентировалась в этом луче таким образом, чтобы находиться в его центре. В результате, системе не нужны ни провода, ни радио; и не страшны ей никакие СОЭП. В принципе, возможна регистрация лазера и последующая постановка дымовой завесы, но и тут есть много самых разных "но". Такая лазерно-лучевая система наведения применяется только в российских и советских ПТРК: "Рефлекс", "Свирь", "Корнет" и "Вихрь", а также на некоторых модификациях "Атаки". Не следует путать с полуактивной лазерной системой наведения c лазерной ГСН, где ракета наводится на пятно лазера, которым подсвечивает цель оператор: такая система работает несколько иначе.