Передвижение на двух ногах является довольно сложной задачей для роботов. Проблема здесь заключается не только в том, что робот может ошибиться в решении поставленной задачи, но и в том, что падение может повредить очень дорогие машины. Робототехники всего мира решают эту проблему разными способами.
«Если человека подтолкнуть к стене или перилам, он способен использовать эти поверхности, чтобы удержаться руками в вертикальном положении. Нам нужны роботы, способные сделать то же самое, - сказал Крис Хаузер, доцент электрической и компьютерной инженерии, машиностроения и материалов в Университете Дьюка. - Мы считаем, что являемся единственной исследовательской группой, занимающейся проблемой выбора точки опоры для рук робота, чтобы предотвратить падение».
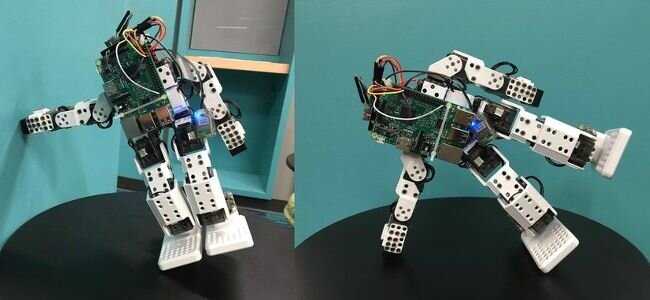
Это достаточно сложная задача даже для программистов высокой квалификации. Чтобы упростить процесс и сэкономить время, в программе Хаузера основное внимание уделяется только бедрам и плечевым суставам робота. Робот должен определить ближайшую поверхность в пределах досягаемости, а затем быстро рассчитать наилучшую комбинацию углов, чтобы опереться. Алгоритм использует лучшее предположение и затем постепенно оптимизирует его, используя метод, называемый прямой съемкой.
В нынешнем состоянии робот просто использует подаваемую информацию об окружающей его среде и не может перемещаться самостоятельно. Но в ближайшем будущем Хаузер планирует использовать более крупного робота с собственной видеокамерой в качестве датчиков окружающей среды.
Понравился пост? Ставьте лайк и подписывайтесь на наш канал, чтобы следить за технологиями будущего!