Сегодня практически вся современная электроника оснащается модулями памяти. Серверы, компьютеры, смартфоны, игровые консоли, GPS-навигаторы и большинство других устройств спроектированы на основе процессоров и ПЛИС. Такие устройства требуют наличия высокоскоростной памяти с большой пропускной способностью каналов или памяти с двойной частотой передачи данных (DDR). С каждым новым поколением DDR SDRAM (синхронной динамической памяти с произвольным доступом и удвоенной скоростью передачи данных) увеличивается скорость обмена данными, ёмкость, снижается энергопотребление памяти.
При проектировании печатных плат устройств с DDR-памятью может возникать ряд сложностей, одной из которых является проблема целостности сигналов. В данной статье рассматриваются вопросы обеспечения целостности сигналов в устройствах, использующих DDR-память.
Шумы и фазовое дрожание цифрового сигнала данных
При приёме/передаче тактового сигнала шины памяти от контроллера к микросхеме могут возникать различные помехи, обусловленные собственным джиттером передатчиков и приёмников, потерями в линиях передачи, шумами и наводками. Всё это приводит к появлению джиттера и искажению формы цифрового интерфейсного сигнала.
В качестве шума можно рассматривать любую нежелательную энергию, добавляемую к идеальному сигналу. Шум может быть вызван наводками от соседних линий, плохо спроектированным каналом передачи, несогласованным импедансом и другими факторами, которые приводят к размыванию фронта импульсов. При отсутствии шума фактический сигнал идентичен идеальному.
Любое отклонение от идеальной формы сигнала влияет на его целостность. Отклонения по времени (джиттер) и отклонения амплитуды/напряжения (шум) также влияют на производительность системы. Если не обеспечить целостность сигналов, то система DDR будет использовать неверную информацию, что значительно увеличит интенсивность битовых ошибок BER (Bit Error Rate). В конечном итоге система будет работать некорректно и неэффективно.
Рассмотрим конкретный пример. Если инженер подключит передатчик к несогласованному приёмнику, находящемуся на некотором расстоянии от него, то форма сигнала будет похожа на ту, что представлена на рисунке 1a. Здесь отчётливо видны «звон» на уровне 0,86 В и паразитные повышающие выбросы на уровне 1,75 В при сигнале 1,2 В. Всё это может привести к сбою в работе логики DDR4, и если печатную плату спроектировать с такой топологией, то со 100% вероятностью возникнут ошибки в потоке данных, что, в свою очередь, может привести к некорректной работе системы.
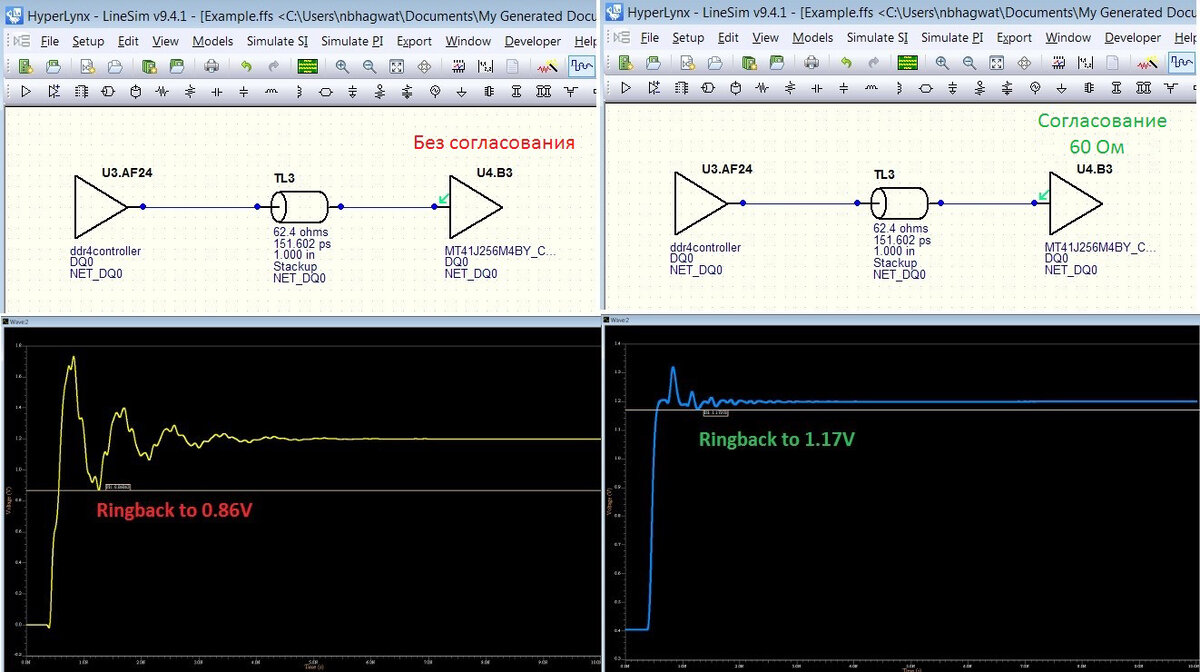
Теоретически можно решить проблемы со «звоном» и выбросами, сократив длину линии передачи, но, к сожалению, это редко работает на практике. Наиболее эффективным способом является согласование приёмника/передатчика по импедансу, в результате чего уменьшается уровень шумов и форма сигнала становится значительно лучше (см. рис. 1б). В связи с этим возникает вопрос, какой номинал согласования использовать и как его рассчитать, ведь даже небольшое изменение номинала может существенно повлиять на производительность системы. Единственный способ решить данную задачу – это симуляция, в частности с помощью интерактивных помощников настройки согласования, используемых в HyperLynx.
Проблемы тайминга в DDRx
Поскольку параллельные шины, работающие на гигагерцовых частотах, такие как DDR3/DDR4, всё чаще и чаще используются при проектировании печатных плат, проблемы целостности сигнала стоят особо остро. DDR3 SDRAM, например, существенно отличается в плане скорости работы и показателей частоты от DDR2: максимальная тактовая частота DDR2 составляет 800 МГц, а максимальная частота DDR3 – 1600 МГц. Благодаря снижению напряжения питания ячеек создателям нового типа ОЗУ удалось снизить её энергопотребление на целых 15%, что, учитывая впечатляющие показатели DDR2, можно назвать настоящим прорывом. DDR3 использует сетевую Fly-by-топологию командной/адресной/управляющей шины с внутримодульным (ODT) согласованием. В то же время DDR3 создаёт новые проблемы обеспечения целостности сигнала, в частности связанные со схемами ODT, более высокими скоростями передачи данных и временными искажениями.
Продолжение: https://www.cad-is.ru/blog_post/ddr-sdram-hyperlynx-ddr
Подробнее о HyperLynx: http://cad-is.ru/hyperlynx
По вопросам приобретения, обучения, бесплатного тестирования и любым другим вопросам, пожалуйста, обращайтесь: info@cad-is.ru тел. 7(495) 740-05-10