История ArduPilot — это больше, чем хроника разработки программного обеспечения. Это история о том, как философия открытого кода, рожденная в гараже энтузиаста, бросила вызов индустриальным гигантам, демократизировала доступ к автономным полетам и неожиданно оказалась в эпицентре глобальных событий. Это путь от термопар, измеряющих горизонт, до управления роями дронов, которые способны изменить ход конфликта.
Рождение идеи: Горизонт, увиденный сквозь тепло (2007–2009)
Все началось в 2007 году, когда Крис Андерсон, бывший главный редактор журнала Wired, запустил онлайн-сообщество DIYDrones.com. Это был форум для таких же, как он, мечтателей, которые верили, что сложные авиационные технологии не должны быть уделом военных или корпораций с миллиардными бюджетами. Андерсон, которого называют «пророком дронов», сформулировал новую парадигму: будущее автономных полетов — за открытым сообществом, а не за закрытыми патентами.
Первые шаги были одновременно гениальными и наивными. Идея, которая сегодня кажется абсурдной, — стабилизировать полет вертолета с помощью термопар (датчиков, определяющих горизонт по разнице температур между небом и землей) — тогда казалась прорывом. В 2008 году талантливый мексиканский инженер Джорди Мунис, присоединившийся к сообществу, представил первый прототип — традиционный вертолет, способный летать автономно с таким автопилотом, и выиграл первый конкурс автономных транспортных средств Sparkfun AVC.
Именно Мунис стал техническим сердцем проекта. В мае 2009 года он и основанная им вместе с Андерсоном компания 3D Robotics (3DR) выпустили первую плату ArduPilot на базе термопар. А в ноябре того же года Мунис создал первый репозиторий кода и написал первую версию ArduIMU (инерциального измерительного модуля), заложив фундамент для всего дальнейшего развития.
Эра APM: Когда каждый мог собрать дрон (2010–2012)
Следующая глава началась с перехода от термопар к полноценным инерциальным измерительным модулям (IMU), объединяющим акселерометры, гироскопы и магнитометры. На базе Arduino-совместимых 8-битных микроконтроллеров Atmega были созданы платы APM (ArduPilotMega) 1.0 и 2.x. Они были, как их позже назовут, «неубиваемыми, как танк» и открыли эпоху массовой доступности. Теперь любой энтузиаст с паяльником мог собрать аппарат, способный не только стабилизироваться, но и выполнять полет по точкам (миссии).
Рост сообщества был взрывным. К разработке присоединились ключевые фигуры, чьи имена стали легендарными в мире ArduPilot:
- Джейсон Шорт (Jason Short) переписал код с нуля (версия 2.5), добавив критически важные функции: возврат домой (RTL), удержание позиции (Loiter) и полноценную телеметрию.
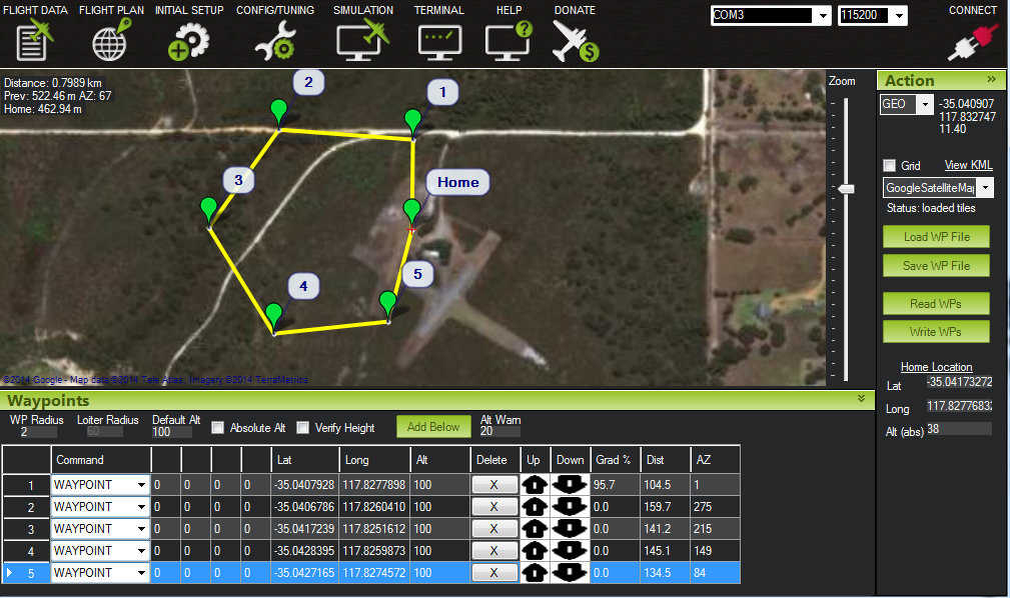
- Майкл Оборн (Michael Oborne) в августе 2010 года выпустил Mission Planner — мощную наземную станцию управления, ставшую основным интерфейсом для миллионов пользователей.
- Эндрю «Тридж» Триджелл (Andrew "Tridge" Tridgell) и Пэт Хики (Pat Hickey) совершили архитектурную революцию. Хики создал AP_HAL (Hardware Abstraction Layer), слой аппаратной абстракции, который отделил высокоуровневую логику полета от низкоуровневого кода для конкретного «железа». Это позволило с легкостью портировать ArduPilot на новые процессоры. Триджелл внедрил системы автоматического тестирования и симуляции, что резко повысило надежность и скорость разработки.
В 2011 году APM2 взлетел на первом полностью автономном квадрокоптере на Sparkfun AVC. Проект вышел из-под контроля основателей в лучшем смысле слова: он стал жить своей жизнью, управляемый глобальным сообществом.
Pixhawk и рывок в будущее (2012–2014)
Несмотря на успех, ограничения 8-битных процессоров были очевидны. Для сложных алгоритмов, таких как расширенный фильтр Калмана (EKF), который мог бы точно определять положение и ориентацию, не хватало вычислительной мощности.
Прорыв произошел в 2012 году в результате сотрудничества 3DR и Швейцарской высшей технической школы Цюриха (ETH Zurich). Был представлен PX4, а в 2013 году — аппаратная платформа Pixhawk. Это был не просто новый контроллер. Это был открытый стандарт на базе мощного 32-битного процессора STM32 (ARM Cortex-M4 с частотой 168 МГц), созданный для того, чтобы стать универсальным мозгом для автономных роботов.
Pixhawk перевернул рынок. Благодаря открытому дизайну, любой производитель мог выпускать совместимые платы, что привело к взрывному росту экосистемы и падению цен. ArduPilot перестал быть «прошивкой для моделей». Он стал кроссплатформенной операционной системой для автономии, способной работать не только на Pixhawk, но и на Linux-компьютерах (Raspberry Pi, BeagleBone), открыв путь для интеграции с системами компьютерного зрения и искусственного интеллекта.
Испытание независимостью и неожиданная роль (2016 – настоящее время)
В 2016 году проект пережил кризис, ставший поворотным моментом. 3DR, сосредоточившись на потребительском рынке, прекратила прямое финансирование ядра разработчиков ArduPilot. Ответом сообщества стало создание некоммерческой организации ardupilot.org, которая и по сей день управляет проектом. Этот переход доказал зрелость и самодостаточность экосистемы, построенной на принципах открытого кода.
Сегодня ArduPilot — это монументальный проект, установленный более чем на миллионе устройств по всему миру. Он поддерживает невероятный спектр аппаратов: от квадрокоптеров, самолетов и вертолетов до роверов, лодок и подводных аппаратов. Его используют в исследовательских целях такие гиганты, как NASA, Intel и Boeing.
Но самой неожиданной главой в истории стала его милитаризация. В 2023 году мировые СМИ сообщили, что украинские беспилотники, атаковавшие стратегические объекты на территории России, использовали ArduPilot. Основатели проекта отреагировали с изумлением. Крис Андерсон прокомментировал кадры атаки: «Это ArduPilot, запущенный из моего подвала 18 лет назад. Безумие». Джейсон Шорт написал: «Я никогда бы не предсказал такого исхода. Я просто хотел делать летающих роботов». Это событие с трагической остротой обнажило двойственную природу любой мощной открытой технологии: она может служить как мирному прогрессу, так и войне, находясь вне контроля своих создателей.
Наследие: Демократизация, ставшая реальностью
ArduPilot — это живой артефакт цифровой эпохи. Его история доказывает, что страсть, сообщество и открытость могут конкурировать с корпоративными гигантами. Из хобби-проекта он вырос в индустриальный стандарт де-факто для автономных систем.
Его философия победила: небо действительно было демократизировано. Теперь студент, ученый, фермер или инженер имеет доступ к тем же технологиям автономного пилотирования, что и крупнейшие корпорации. Слухи о том, что его код изучают в оборонных ведомствах, а алгоритмы навигации без GPS считаются эталонными, — это уже не слухи, а признание мощи проекта, который начался с измерения горизонта по температуре в подвале энтузиаста. ArduPilot навсегда изменил представление о том, кому может принадлежать небо.