Для построения точных карт местности дроны используют технологию SLAM (Simultaneous Localization and Mapping — одновременная локализация и построение карты) в сочетании с лидарами (LiDAR) и другими сенсорами. Разберём принцип работы поэтапно. Суть: SLAM позволяет дрону одновременно определять своё местоположение и строить карту окружающей среды — без заранее подготовленных данных и даже при слабом/отсутствующем GPS. Ключевые задачи: Ограничения лидара: Дроны строят карты местности через SLAM, комбинируя данные лидаров, камер и инерциальных сенсоров: Результат — детализированные 2D/3D‑карты, пригодные для геодезии, мониторинга и планирования, даже в условиях слабого GPS.
Для построения точных карт местности дроны используют технологию SLAM (Simultaneous Localization and Mapping — одновременная локализация и построение карты) в сочетании с лидарами (LiDAR) и другими сенсорами. Разберём принцип работы поэтапно.
1. Что такое SLAM
Суть: SLAM позволяет дрону одновременно определять своё местоположение и строить карту окружающей среды — без заранее подготовленных данных и даже при слабом/отсутствующем GPS.
Ключевые задачи:
- локализация — вычисление позиции дрона относительно объектов;
- картографирование — создание и обновление карты по мере движения;
- коррекция ошибок — минимизация накопленных неточностей.
2. Сенсоры, используемые в SLAM
- Лидар (LiDAR) — основной инструмент для точных измерений:
посылает лазерные импульсы и замеряет время их возврата;
строит «облако точек», отражающее расстояния до объектов;
даёт высокоточные 3D‑данные даже в темноте. - Камеры (моно-, стерео-, RGB‑D):
визуальный SLAM (vSLAM) анализирует изображения для отслеживания ориентиров;
стереокамеры оценивают глубину через параллакс. - Инерциальная система (IMU):
измеряет ускорение и угловую скорость;
помогает оценивать перемещение между кадрами сенсоров. - Ультразвуковые/инфракрасные датчики — дополнение для ближнего диапазона.
3. Как работает SLAM: основные этапы
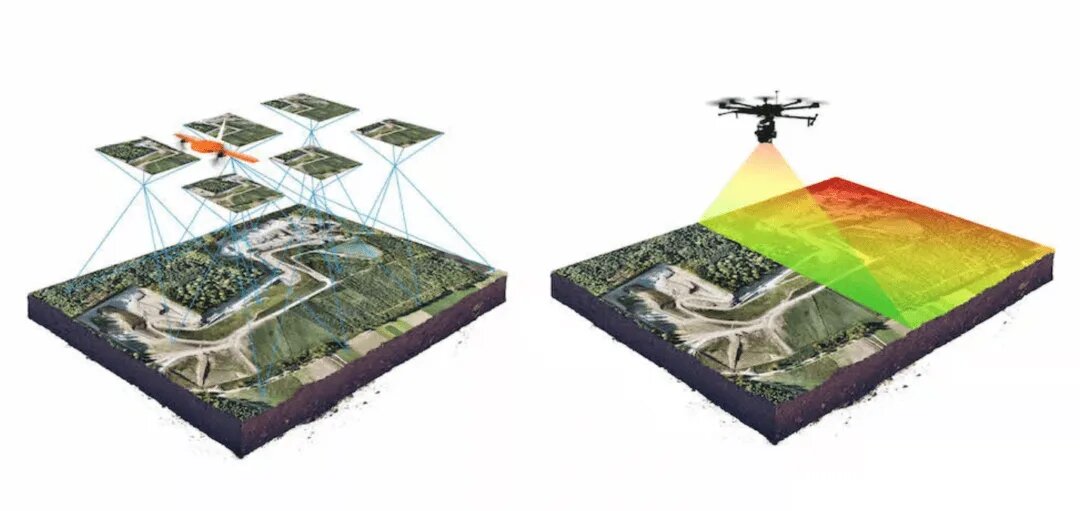
- Сбор данных
Дрон получает потоки данных от лидара, камер и IMU.
Лидар формирует облако точек; камеры — изображения; IMU — данные о движении. - Локализация
Алгоритмы сопоставляют новые данные с уже построенной частью карты.
Определяют смещение дрона (насколько и куда он переместился с последнего измерения). - Построение карты
Новые данные интегрируются в карту (добавляются точки, контуры, текстуры).
Для лидара — обновляется 3D‑облако; для камер — 2D/3D‑модель с текстурами. - Оптимизация и замыкание контура
При повторном пролёте над уже изученной зоной система «узнаёт» места.
Корректирует накопленные ошибки локализации (метод loop closure).
Используются графовые алгоритмы и фильтры (например, фильтр Калмана). - Итерация
Цикл повторяется в реальном времени: новые данные → локализация → обновление карты.
4. Типы SLAM для дронов
- LiDAR SLAM
опора на данные лидара;
высокая точность расстояний и 3D‑структуры;
работает в темноте, но менее информативен для текстур. - Визуальный SLAM (vSLAM)
использует камеры;
хорошо распознаёт текстуры и ориентиры, но зависит от освещения;
часто комбинируется с IMU (визуально‑инерциальный SLAM). - Гибридный SLAM
объединяет лидар, камеры и IMU;
повышает надёжность и точность за счёт избыточности данных.
5. Как лидар улучшает картографирование
- Точность расстояний: погрешность — единицы сантиметров.
- 3D‑детализация: строит плотные облака точек, отражающие форму объектов.
- Работа в любых условиях: не зависит от освещённости (в отличие от камер).
- Скорость: сотни тысяч измерений в секунду.
- Фильтрация земли: легко отделяет поверхность от растительности/зданий.
Ограничения лидара:
- высокая стоимость сенсоров;
- большой объём данных (нужны мощные процессоры);
- сложность распознавания тонких объектов (проводов, веток).
6. Алгоритмы и ПО
- ORB‑SLAM, VINS‑Mono — популярные vSLAM‑алгоритмы.
- LOAM (Lidar Odometry and Mapping) — для лидарных данных.
- RTK/PPK — дополняют SLAM для геодезической точности.
- ROS (Robot Operating System) — фреймворк для интеграции сенсоров и алгоритмов.
- CloudCompare, Agisoft Metashape, DroneDeploy — ПО для постобработки и визуализации.
7. Примеры применения
- Картографирование городов — 3D‑модели зданий, дорог, инфраструктуры.
- Лесное хозяйство — оценка плотности и высоты древостоя.
- Горное дело — обследование карьеров, шахт (даже без GPS).
- Сельское хозяйство — цифровые модели полей, мониторинг посевов.
- Чрезвычайные ситуации — оперативное картирование зон пожаров, наводнений.
- Строительство — контроль хода работ, объёмов материалов.
8. Вызовы и ограничения
- Вычислительная нагрузка: обработка облаков точек и изображений требует мощных бортовых процессоров.
- Накопление ошибок: без замыкания контура карта «плывёт» со временем.
- Динамические объекты: люди, машины могут искажать карту.
- Погодные условия: дождь, туман ослабляют лидар и камеры.
- Стоимость: промышленные лидары дороги; камеры дешевле, но менее точны.
- Время полёта: объём данных ограничивает длительность миссии.
9. Современные дроны с SLAM и лидаром
- DJI Matrice 300 RTK + Zenmuse L1 — лидарный комплекс для промышленного картографирования.

- Parrot ANAFI — дрон с vSLAM для indoor‑инспекции.
- Skydio 2 — автономная навигация на базе камер и ИИ.
- InnoSpector (Россия) — дрон для шахт с LiDAR SLAM.
Итог
Дроны строят карты местности через SLAM, комбинируя данные лидаров, камер и инерциальных сенсоров:
- Лидар даёт точные 3D‑измерения расстояний.
- SLAM решает две задачи одновременно: где дрон находится и как выглядит окружающая среда.
- Алгоритмы оптимизации корректируют ошибки и замыкают контуры для повышения точности.
Результат — детализированные 2D/3D‑карты, пригодные для геодезии, мониторинга и планирования, даже в условиях слабого GPS.