
Использование MATLAB и его расширения Simulink для разработки программного обеспечения программируемых логических контроллеров (ПЛК) представляет собой современный подход, известный как Модельно-Ориентированное Проектирование (Model-Based Design, MBD). Этот метод позволяет значительно повысить качество кода, сократить время разработки и обеспечить надежную верификацию управляющих алгоритмов.
1. Концепция модельно-ориентированного проектирования
Традиционный процесс разработки программы для ПЛК включает ручное написание кода (например, на языках МЭК 61131-3), а затем его тестирование на реальном оборудовании или симуляторе. MBD меняет эту парадигму:
Моделирование Объекта Управления (ОУ): Создается математическая модель физического объекта (например, насосной станции, теплообменника, станка) в среде Simulink.
Разработка Алгоритма Управления: Разрабатывается алгоритм контроллера, который взаимодействует с моделью ОУ в Simulink.
Симуляция и Верификация: Программа контроллера и модель ОУ запускаются совместно (симуляция). Это позволяет верифицировать работу алгоритма в различных режимах и при нештатных ситуациях до написания единой строки кода ПЛК.
Автоматическая Генерация Кода: Используя специализированный инструмент Simulink PLC Coder, алгоритм управления автоматически преобразуется в исходный код, совместимый с ПЛК.
Развертывание: Сгенерированный код импортируется в интегрированную среду разработки (IDE) производителя ПЛК (например, TIA Portal, CODESYS, Studio 5000) для компиляции и загрузки в контроллер.
2. Инструментарий: Simulink PLC Coder
Ключевым инструментом, обеспечивающим связь между средой моделирования и ПЛК, является Simulink PLC Coder.
Генерация Кода по Стандарту IEC 61131-3
Simulink PLC Coder позволяет генерировать аппаратно-независимый исходный код в форматах, соответствующих международному стандарту МЭК 61131-3:
Структурированный Текст (ST): Наиболее распространенный формат генерации. Идеально подходит для сложных математических алгоритмов, замкнутых систем регулирования (например, ПИД-регуляторов) и управления режимами.
Лестничные Диаграммы (LD): Генерация логики в графическом виде, более привычном для инженеров по автоматизации. Simulink PLC Coder имеет специальную библиотеку PLC Ladder, позволяющую строить модели, максимально соответствующие синтаксису лестничных схем.
PLCopen XML: Универсальный формат, который позволяет импортировать сгенерированную логику в IDE различных производителей.
Гибкость и Сложность
Simulink позволяет создавать сложные алгоритмы, включая:
Моделирование дискретной логики с помощью Stateflow (диаграммы состояний и переходов).
Использование функций MATLAB для реализации пользовательских математических расчетов.
Создание сложных многоконтурных систем управления с обратной связью.
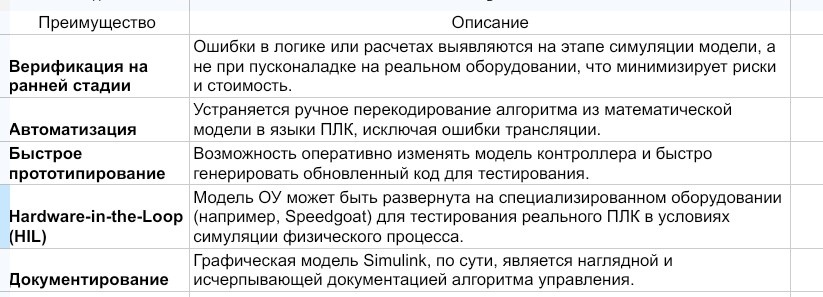
3. Преимущества симуляции перед
ручным кодированием
4. Этапы процесса разработки
Создание Модели ОУ: Разработка математических уравнений и блоков, описывающих динамику управляемого объекта в Simulink.
Разработка Модели Контроллера: Создание подсистемы в Simulink, содержащей алгоритмы управления, логику, защиты и регуляторы (например, ПИД).
Совместная Симуляция: Запуск модели с различными входными данными, возмущениями и аварийными ситуациями для тонкой настройки и проверки устойчивости системы.
Конфигурация PLC Coder: Настройка параметров генерации (выбор целевого языка, целевой IDE, оптимизация кода, типы данных).
Генерация Кода: Автоматическое создание файла Structured Text (ST) или PLCopen XML.
Импорт и Развертывание: Импорт сгенерированного кода в IDE ПЛК (например, как функциональный блок FB) и загрузка на целевой контроллер.
Этот подход позволяет инженерам сосредоточиться на алгоритмах управления и динамике системы, передавая рутинную и подверженную ошибкам задачу кодирования автоматизированному инструменту.