Беспилотные автомобили — это уже не фантастика, а реальность. Ещё недавно мы могли только восхищаться машинами из фильмов про будущее. Но автомобильная индустрия, как и другие сферы промышленности и технологий, развивается очень быстро. И вот уже беспилотный автомобиль едет по дороге рядом с нами. Кажется, ещё немного, и летающий DeLorean доктора Эмметта Брауна внезапно окажется рядом с Вами на светофоре, сопровождаемый молниями, вспышками и скрипом колёс.
Однако стоит помнить, что любая новая технология имеет не только положительные стороны. Например, электрические автомобили — это отличное экологичное решение для борьбы с загрязнением атмосферы. Но производство и утилизация аккумуляторов для них пока далеки от совершенства «зеленых» технологий.
А как будет работать беспилотное управление? Сложно сказать однозначно. Эту проблему нужно изучить. Именно этим мы и занялись. Предлагаем вам ознакомиться со статьёй о беспилотном управлении, принципах и концепциях его работы.
Суть работы беспилотного управления:
Всё довольно просто. Большинство компаний, которые разрабатывают эту технологию, придерживаются одного принципа. Сенсоры, которые можно сравнить с человеческим глазом, собирают информацию об окружающей обстановке и передают её «мозгу» автомобиля. «Мозг» анализирует данные с сенсоров и карт местности, изучает загрузку дорожной сети, информацию о скорости объектов и прочее, чтобы составить полную картину ситуации на дороге в данный момент и спрогнозировать ее развитие. На основе этой информации автомобиль принимает решение о том или ином маневре.
Эта информация передается в систему управления автомобилем, которая отвечает за движение по заданной траектории, обход препятствий и реакцию на светофоры.
В целом, этим процессом управляют три компонента: сенсоры, отвечающие за восприятие окружающей среды, система планирования и управления движением, а также непосредственно управление автомобилем.
Разберемся более подробно:
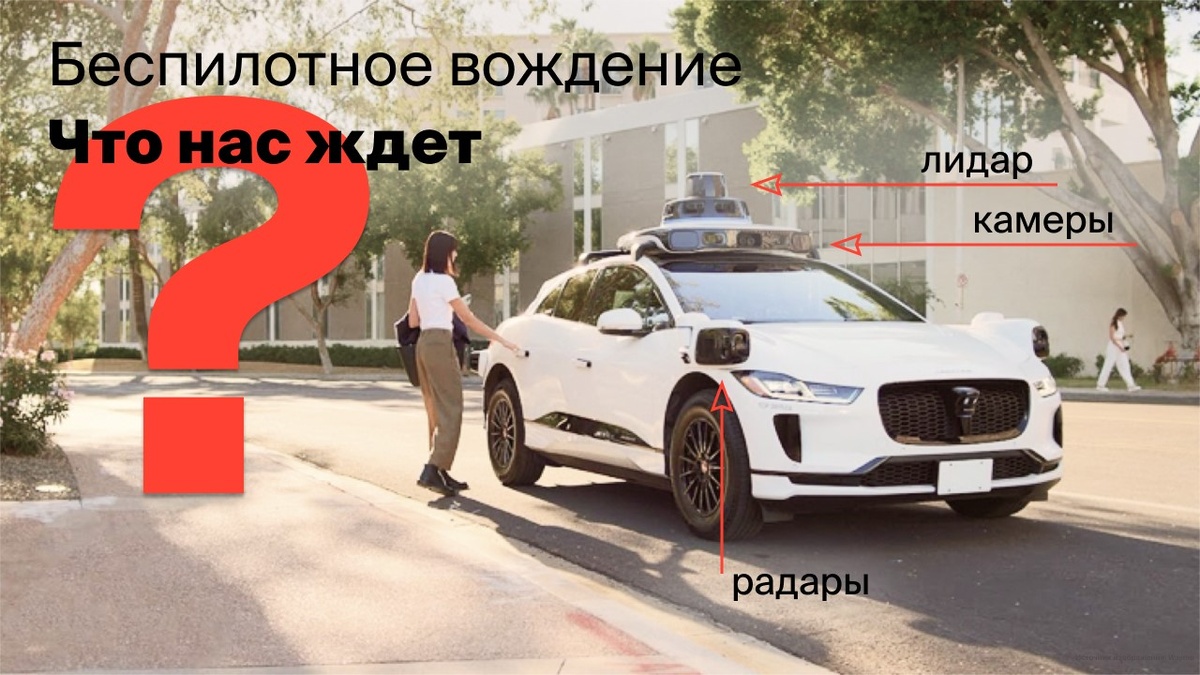
- Сенсоры:
Обычно сенсорами называют камеры, расположенные по периметру автомобиля. Но также сенсорами могут быть и радары, и лидары — устройства, которые предназначены для обнаружения препятствий и отслеживания изменений на дороге и за её пределами.
Комбинация этих сенсоров позволяет днем и ночью получить детальную информацию о каждом объекте на дороге: его форме, скорости и расстоянии до него и траектории движения. Камеры определяют тип и форму объектов, радар использует радиоволны для распознавания объектов с другого ракурса и передачи данных о их скорости, а лидар измеряет расстояние до объекта.
Таким образом, данные о дорожной обстановке сканируются сразу с нескольких устройств, и автомобиль не только получает чёткую картинку на мониторе, как при работе парковочного ассистента, но и может определить размеры и скорость других объектов прямо во время движения.
Этот принцип работы используется в большинстве автомобилей с автономным управлением. Один из ярких примеров — компания Volkswagen.
- Система планирования и управления авто:
Система планирования и непосредственного реагирования, то есть управления, в автомобиле с беспилотным вождением выполняет различные функции.
Искусственный интеллект обрабатывает информацию, полученную от сенсоров и камер, и управляет автомобилем. Перемещение автомобиля включает в себя такие принципы, как локализация, восприятие, предсказание и планирование.
До того, как автомобиль повернёт или остановится, он должен проанализировать сотни факторов и принять решение за считанные доли секунды в режиме реального времени.
Сначала беспилотник определяет расположение различных объектов, таких как светофоры, дорожная разметка и дорожные знаки. Затем он идентифицирует окружающие объекты, определяет их скорость, направление движения и форму. После этого он прогнозирует движение других автомобилей, что является наиболее сложной задачей. Даже человек не всегда готов к следующему действию на дороге и не всегда может предсказать разворот транспортного средства, если тот не включил поворотник.
У человека может уйти пара секунд на обработку информации и принятие решения об экстренном торможении или повороте, в то время как у робота это займёт меньше времени, и он точно не упустит ничего из внимания.
Алгоритмы беспилотника определяют дальнейшие действия и отдают команды системам управления, которые осуществляют маневры по заданному маршруту.
- Использование систем GPS
Современные беспилотные автомобили не требуют систем навигации, таких как GPS, для своей работы. Они способны самостоятельно анализировать дорожную ситуацию и строить маршруты.
В контексте такого автомобиля система GPS может служить дополнительным инструментом, но не является основой для управления. Информация, получаемая от спутников, не настолько точна, чтобы беспилотник мог полностью полагаться на неё.
Системы сенсоров и управления автомобиля гораздо лучше и точнее распознают окружающую среду, чем спутниковые системы. Поэтому при управлении беспилотником погрешности в 10 метров являются серьёзной проблемой. В связи с этим необходимо полагаться исключительно на актуальную дорожную ситуацию в конкретном месте и времени.
Для этого большинство беспилотных систем используют карты, которые автомобиль строит и сканирует самостоятельно, используя лидар, радар и камеры.
Илон Маск – отступник от общей концепции беспилотных автомобилей.
Как мы уже выяснили, лидар — это основной инструмент для функционирования системы управления автомобилем. Он считывает информацию о дороге, которая затем сохраняется в памяти автомобиля. Многие компании полагаются именно на эту систему, не используя данные GPS. Некоторые фирмы покупают стартапы, занимающиеся разработкой лидаров, а другие создают свои собственные.
Однако у лидаров есть существенный недостаток — они не распознают цвета, поэтому не могут считывать дорожные знаки. Кроме того, им трудно определять сложные формы объектов. К тому же, лидар — самая дорогая часть конструкции для беспилотного управления автомобилем.
Лидары не только дорогие, но и склонны к поломкам. Они сканируют дорогу на 360 градусов, для чего в них установлено множество зеркал, которые постоянно вращаются. Со временем это может привести к поломке.
Камеры также не всегда помогают считывать обстановку или распознавать дорожные знаки. В условиях грязи, пыли, дождя и солнечных бликов картинка у сенсоров становится размытой, что может привести к неверному прочтению информации о дорожной обстановке.
Таким образом, задача создания качественных систем для беспилотного управления автомобилем становится всё более сложной и затратной. Поэтому появляются люди, которые верят в менее дорогие лидары без множества зеркал. Конечно, это снижает качество функционирования системы. А некоторые считают, что беспилотное управление вообще возможно без использования лидаров.
К последним относится Илон Маск.
Вера Илона Маска не обречена на провал. Вместо дорогих лидаров используются нейросети и сенсоры. В классической концепции нейросети тоже применяются, но не играют такой важной роли, как в случае с Tesla.
Необученная Tesla собирает множество картинок и видео, на которых запечатлены ситуации с участием людей и автомобилей. Затем она анализирует и запоминает эту информацию. Так она обучается и постепенно становится лучше.
Система пилотирования Илона Маска построена на том, что нейросеть Tesla будет «копировать» поведение людей и автомобилей. Затем она будет использовать эти данные на дороге для управления автомобилем во время движения.
В компании Маска считают, что для того чтобы беспилотный автомобиль научился распознавать сложные объекты в любых условиях, ему нужно показать достаточное количество различных изображений (дорожных ситуаций).
Специалисты компании «обучают» искусственный интеллект, предоставляя ему набор изображений, которые уже были классифицированы по категориям. Затем они корректируют его работу в соответствии с этой классификацией. Например, если показать искусственному интеллекту миллион слегка отличающихся изображений велосипедиста или светофора, то он научится распознавать их с вероятностью, близкой к 100%.
Чем больше данных предоставить искусственному интеллекту, тем выше вероятность того, что он сможет точно идентифицировать объекты. По сути, мы делаем то же самое, когда показываем детям картинки с животными или когда заполняем очередную капчу на сайте.
Итог:
Беспилотные автомобили из фантазии стали реальностью, демонстрируя быстрое развитие технологий. Эти машины, управляемые сенсорами и искусственным интеллектом, предлагают безопасное и эффективное передвижение. Однако их внедрение в нашу жизнь связано с техническими и социальными вызовами. Лидары, используемые для распознавания объектов, дорожной разметки и управления, дороги и ненадежны в сложных условиях. Альтернативные методы, такие как нейросети в Tesla, обучают автомобили распознавать и реагировать на ситуации, анализируя огромные массивы данных.
Будущее беспилотных автомобилей многообещающе: они могут повысить безопасность на дорогах и снизить экологическое воздействие. Однако обществу предстоит решить множество вопросов, связанных с безопасностью, надежностью и этикой их использования.