Робототехника давно внедрена и повсеместно используется на промышленных и производственных объектах. Роботизированные конструкции помогают избежать тяжелого или монотонного физического труда на сборочной линии и складах, собирая отдельные части продукции с высокой точностью, а затем передавая их работникам, которым затем завершают определенные действия.
Однако в последние годы инженеры пытались разработать более совершенную систему, которая бы еще больше улучшала взаимодействие робота и сотрудника на производстве. Недавно было предложено решение, которое основано на так называемом "цифровом двойнике" - это система виртуальной модели, предназначенная для точного воспроизведения физического объекта, даже если по каким-то причинам он не виден роботу.
Исследователи из Нанкинского университета аэронавтики и астронавтики в Китае недавно представили новую систему цифровых двойников, которая может улучшить взаимодействие между людьми и роботами-агентами в производственных условиях. Эта система, представленная в статье журнала Робототехника и компьютерно-интегрированное производство, может создавать виртуальную карту реального окружения, помогающую планировать и добиваться необходимого поведения робота совместно с человеком при выполнении определенной задачи.
"В промышленных условиях нынешние методы построения модели цифрового двойника человека основаны на устройствах захвата движения, которые требуют от персонала ношения громоздкого оборудования, что противоречит принципу гибкого взаимодействия", - сказал Цзэцюнь Чжан, один из авторов разработки.
"Более того, нынешние методы не моделируют людей и роботов в едином пространстве, что неудобно для восприятия и понимания окружающей среды в целом. Чтобы устранить эти ограничения, в данной системе предлагается технология цифровых двойников".
Система цифровых двойников, созданная Чжаном и его коллегами, создает виртуальную копию сцены, в которой сотрудничают человек и робот-агент. Впоследствии планируется улучшать стратегии взаимодействия и реализовать их в реальной среде.
Было обнаружено, что ранее предложенные системы цифровых двойников, основанные на данных, собранных датчиками захвата движения, часто достигают неудовлетворительных результатов при наличии, когда нужные объекты находятся за пределами поля зрения. Исследователи разработали новый алгоритм, который позволяет восстановить сетку силуэта и сделать ее видимой для робота.
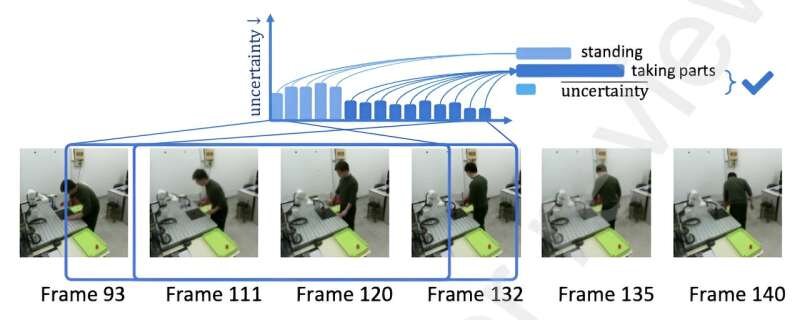
Кроме того, китайские ученые внедрили в эту систему метод оценки неопределенности и контроля риска в случае, если алгоритм допустит ошибки.
Система цифровых двойников была проверена в серии экспериментов в лабораторных условиях с использованием робота, предназначенного для промышленных условий. Было обнаружено, что она улучшает сотрудничество между роботом и человеком-агентом при выполнении различных задач, связанных, например, с полировкой, сборкой и разборкой объектов.
«Результаты экспериментов демонстрируют превосходство предлагаемых методов над базовыми методами», - сказал Чжан. Будут проведены дополнительные эксперименты и в конечном счете планируется систему быстро реализовать для производственно-промышленных задач в Китае.