![Миниатюрный робот движется на свет подобно мотыльку [ВИДЕО]](https://avatars.dzeninfra.ru/get-zen_doc/1926321/pub_65067b3a09c67317bf28b476_65067b4209c67317bf28b5ce/scale_1200)
Робототехники представили миниатюрного робота CurveQuad массой всего 11 грамм, который передвигается с помощью гибких складок и одного-единственного актуатора. При этом он, подобно мотыльку, движется к источнику света, определяя его положение с помощью встроенных фотоэлементов.
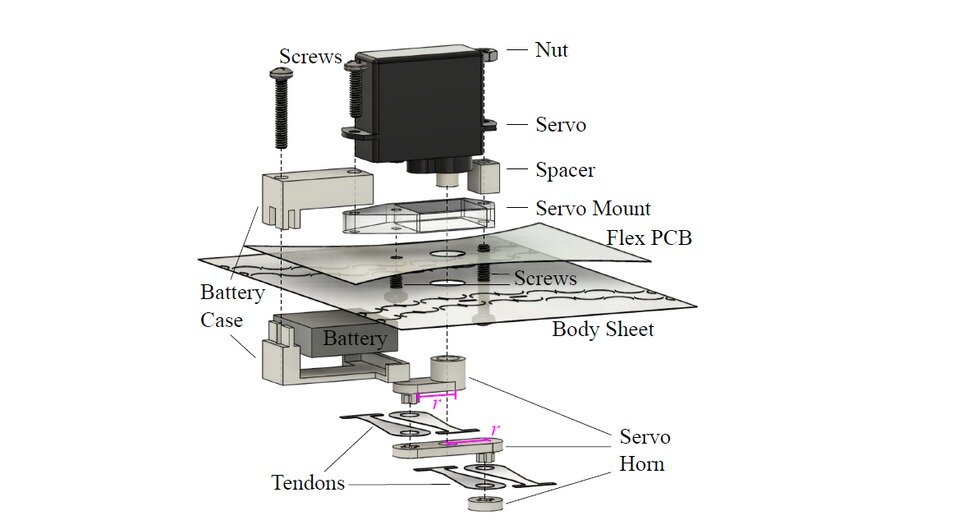
Ключевая деталь корпуса CurveQuad представляет собой тонкую прямоугольную пластину из PET-пластика (полиэтилентерефталат) размером 80х55 миллиметров. В ней с помощью лазера выполнены прорези в виде последовательно расположенных полукругов, образующих паттерн в форме двух параллельных дуг с каждой стороны пластины, симметрично расположенных относительно центра. А в центральной полосе обеих дуг на небольшом расстоянии друг от друга закрепляются концы двух «сухожилий» — тяг, которые соединяются противоположной стороной с концами рычага, закреплённого на сервомоторе. Ось последнего находится в центре пластины. Сервопривод может поворачивать рычаг в диапазоне 270 градусов, при этом «сухожилия», соединяющие концы рычага с корпусом, стягивают его внутрь, приводя к изгибам. В зависимости от угла поворота рычага корпус может из плоской пластины принять симметричную куполообразную форму. В этом положении концы пластины превращаются в четыре конечности робота.
В промежуточных положениях рычага сервопривода корпус несимметрично деформируется по диагонали. При этом передняя «конечность» приподнимается над поверхностью, а задние смещаются друг относительно друга. Из-за возникающей между ними разности в силах трения в этот момент корпус робота смещается вперёд. Если затем такую же деформацию выполнить в противоположную сторону, то робот сделает второй шаг с помощью второй «ноги». Регулируя с помощью угла поворота рычага величину деформации, а следовательно, и длину шага слева и справа можно управлять вектором движения бота.
Обратная связь с роботом обеспечивается с помощью четырёх фотоэлементов на углах корпуса. В своей следующей работе инженеры планируют сосредоточиться на взаимодействии между несколькими роботами CurveQuad.