Предыдущие подборки: Квадрокоптер в деталях, Подбор компонентов, Введение
Предыдущие части: Калибровки и режимы, Настройка моторов, Проблемы размещения, Порт приёмника, ELRS, Прошивка контроллера, Запчасти
Так как сборка моего коптера приблизилась к финалу, нужно осветить некоторые проблемы, которые могут возникнуть. По статистике, они случаются довольно часто у новичков, но я сам сталкивался с ними даже после нескольких лет в хобби.
Итак, вы собрали коптер, настроили, и наконец готовы его запустить.
Сразу после арминга или при взлёте коптер ведёт себя странно. Он может резко перевернуться, или крутиться как волчок, или лететь не туда, куда надо, или устремиться ввысь и потом упасть оттуда.
Причин у такого поведения может быть много, но к счастью в большинстве случаев их можно устранить, просто проверив всё ещё раз.
У вас может быть полная уверенность, что вы всё сделали правильно и проверили 10 раз. И эта уверенность, и эти успешные проверки могут оказаться ложными. Это будет для вас большим сюрпризом. Таких случаев очень много, поэтому не верьте себе и проверяйте ещё раз более тщательно.
1. Порядок моторов
Моторы должны располагаться в соответствии с выбранной схемой. Она зависит от прошивки, поэтому всегда сверяйтесь с прошивкой. Для FPV-коптеров схема обычно такая:
Цифры 1, 2, 3, 4 означают, что задний правый мотор надо подключить к моторному выходу 1, передний правый мотор к выходу 2 и т.д.
Ошибиться, казалось бы, трудно, так как моторные выходы подписаны на плате полётного контроллера и обычно находятся по углам платы, как раз напротив нужных моторов.
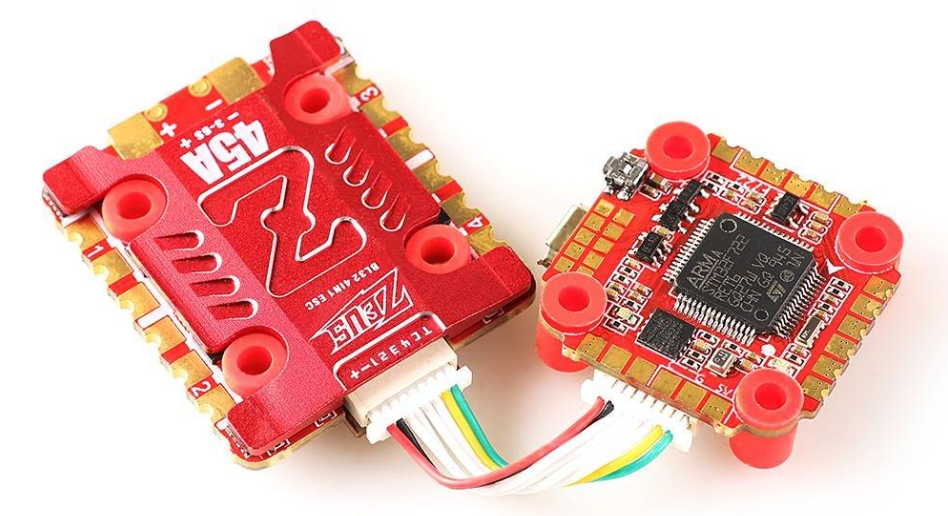
Но если используется регулятор 4в1, то он соединяется с контроллером шлейфом, где есть все 4 моторных провода. Если провода в шлейфе перепутаны, то моторы могут оказаться подключёнными не к своим выходам.
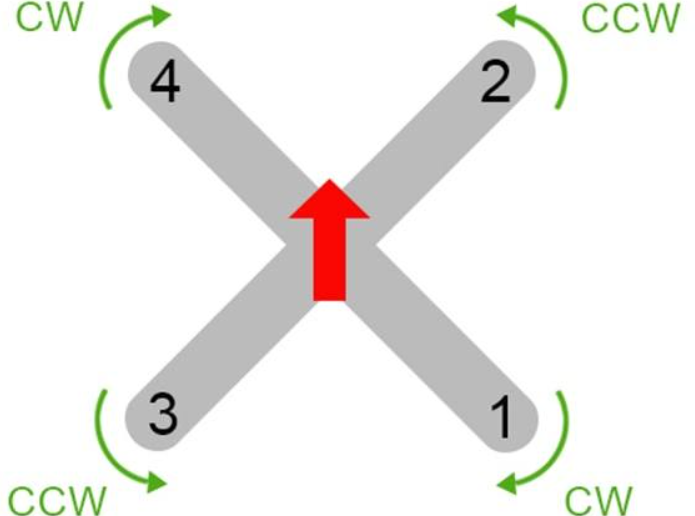
2. Направление вращения моторов
Моторы должны вращаться так, как показано на схеме. Иногда направление каждого мотора меняют на противоположное, чтобы например трава не летела в камеру. Но коптер начинает вращаться не в ту сторону и чтобы это устранить, нужно менять настройки миксера.
3. Миксер и ориентация полётного контроллера
Миксер это таблица, в которой прописаны коэффициенты тяги для каждого мотора для совершения поворотов вокруг каждой оси. Если моторы стоят стандартно, но миксер задан нестандартно, то конечно нормального полёта не будет.
То же относится и к ориентации полётного контроллера. Если он повёрнут, то нужно не забыть указать в прошивке, на сколько градусов.
4. Пропеллеры
Так как моторы вращаются по часовой стрелке и против, есть и два вида пропеллеров: правые и левые.
Ошибиться можно, поставив на мотор несоответствующий ему пропеллер, или соответствующий, но вниз головой. Да, всё это случалось у меня, и притом неоднократно. За этим реально надо следить.
5. Вибрации и резонансы
Они просто сводят полётный контроллер с ума. Обычно это проявляется в том, что коптер выдаёт максимальную тягу и ракетой летит вверх. Управление при этом бесполезно. Если вы вовремя не отключите коптер, падать он будет уже с большой высоты.
Если в системе нет явного источника вибраций (например, плохой мотор или кривой пропеллер), то нужно искать, что открутилось. Может открутиться мотор или полетный контроллер, или винт в раме, или стойка GPS-антенны.
6. Мотор не стартует или дёргается
Такое поведение говорит о неисправности регулятора или о нарушении электрического контакта внутри мотора. А это может случиться, когда один из трёх проводов отпаялся от регулятора (что легко исправляется), либо оторвался от вывода обмоток мотора (что критично, но есть шансы на ремонт), либо когда винт, которым мотор прикручен к раме, вкручен в него так глубоко, что достал до обмоток и повредил их (а вот это уже плохо). Вы не поверите, сколько людей портят моторы, прикручивая их слишком длинными винтами.
7. Забитый мотор
Так как в моторах сильные магниты, туда может прилипнуть какой-нибудь мелкий металлический предмет и частично заклинить мотор. Также может намотаться трава, попасть песок или земля и т.п. Моторы надо держать в чистоте, а свободу вращения проверять руками и на слух.
8. Failsafe
Режим Failsafe случается, когда коптер улетает слишком далеко и теряет связь. Парадоксально, но когда коптер находится очень близко, Failsafe тоже может произойти, и у некоторых приёмников это известная особенность. Например, у приёмника FrSky XM+. Когда аппаратура слишком близко (до 2-х метров), сигнал от неё такой сильный, что приёмнику становится нехорошо.
В этот момент коптер делает то, что запрограммировано в режиме Failsafe: может упасть, приземлиться или начать возврат домой. Перед возвратом домой он обычно набирает высоту, поэтому выглядит это так, что коптер ни с того ни с сего перестал реагировать на управление и полетел вверх.
9. Моторы без пропеллеров
Это абсолютный хит, на который попадаются все. К счастью, он не является ошибкой.
Если включить моторы без пропеллеров и затем дать немного газу, они начнут неконтролируемо раскручиваться, и если убрать газ до нуля, это уже не поможет, моторы будут продолжать оставаться на высоких оборотах.
Здесь всё просто: вы даёте команду взлетать, и коптер пытается это сделать. Но так как пропеллеров нет, то ничего не получается, поэтому коптер считает, что он падает, и увеличивает тягу самостоятельно.
Читайте дальше: