Сотрудники Массачусетского технологического института и Иллинойсского университета представили свою разработку — двуногого робота HERMES (Highly Efficient Robotic Mechanisms and Electromechanical System).
Он может повторять движения за человеком-оператором при помощи специальной системы обучения.
Принцип работы заключается в то что робот наступая на обломки или неровности начнет терять равновесие, оператор почувствует такую же неустойчивость и инстинктивно отреагирует, дабы избежать падения. Мы запоминаем эту физическую реакцию и посылаем ее обратно роботу, что способствует ему избежать падения. В результате этой связи «человек-робот» второй может пользоваться врожденными двигательными навыками оператора и мгновенными рефлексами, чтобы сохранить свою опору.
Динамическая синхронизация была достигнута путем масштабирования главных компонентов данных о передвижении человека до соотношений робота в данный момент времени и приложения к оператору сил обратной связи, пропорциональных относительной скорости между человеком и роботом.
Таким образом, робот научился делать то, что ранее не умел - танцевать, прыгать или же отбиваться от бандитов в темном дворовом переулке, повторяя все движения союзника.
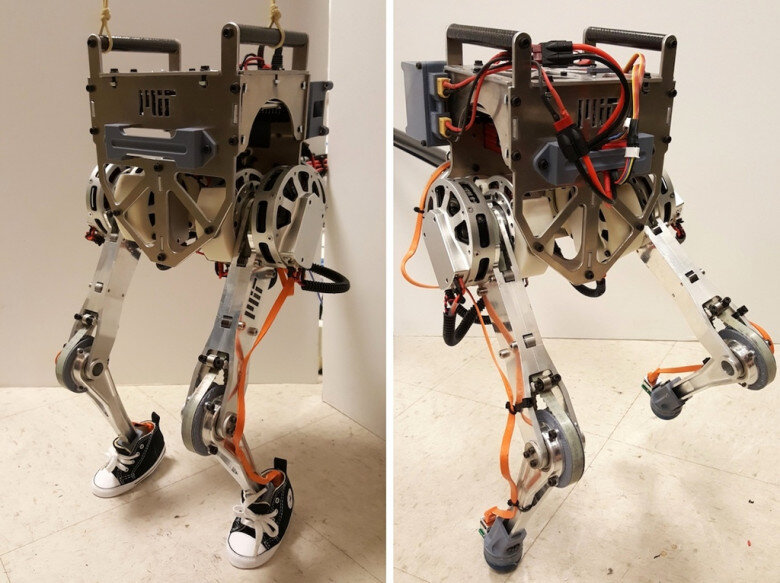
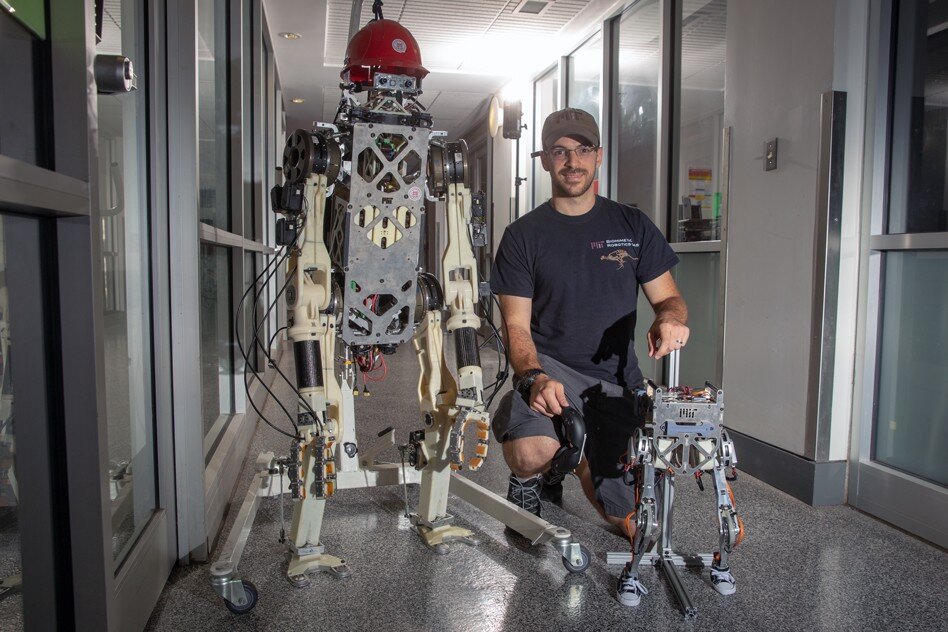
При экспериментах, все же, проявились и недостатки. У робота возникли трудности с балансом, так как его поддержка не была отработана, а сам он был закреплен. Разработчики утверждают, что проблему решат при помощи уменьшенной версии Little HERMES, которая имеет высоту около трети среднего роста взрослого человека. Эту систему сделали специально для тренировки и проверки задач на нижнюю часть его корпуса, в том числе передвижение и баланс. Пока он может шагнуть и попрыгать на месте.
Теперь же планируется создать аналогичную систему более солидного размера и с большими руками-манипуляторами. Кроме того, ученые намерены в будущем перейти на беспроводной интерфейс, тогда как сейчас коммуникация между жилетом оператора и машиной осуществляется посредством кабеля.