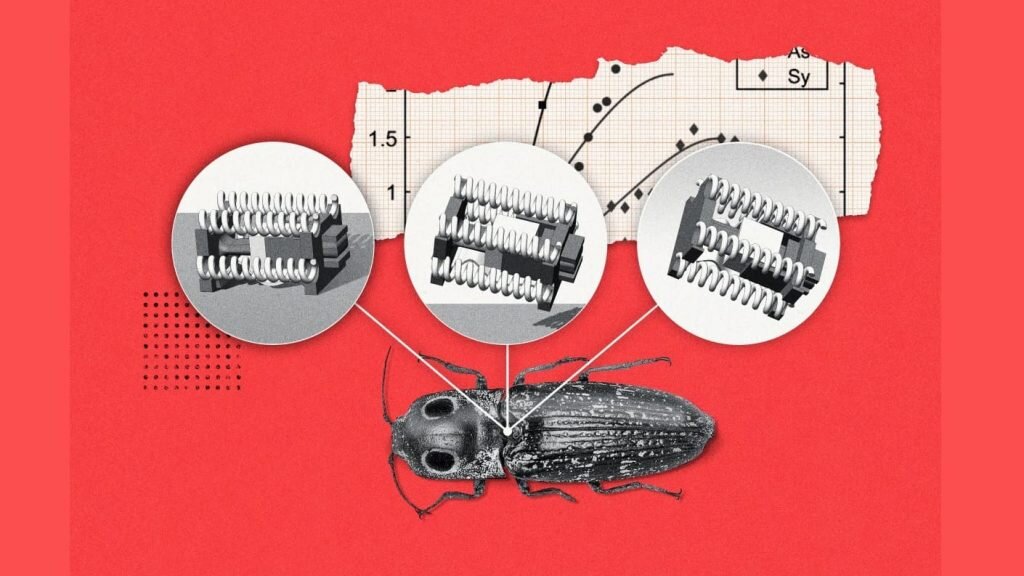
Исследователи из Иллинойского университета в Урбане-Шампейне и Принстонского университета использовали анатомию, механику и эволюцию жуков-щелкунов, чтобы создать прыгающих роботов размером с насекомое. Они достаточно маленькие, чтобы поместиться в ограниченном пространстве, достаточно мощные, чтобы преодолевать препятствия, и достаточно быстрые, чтобы соответствовать скорости насекомого.
Ученые использовали крошечные спиралевидные приводы, которые имитируют работу мышц в грудной клетке жука-щелкуна. Искусственный привод тянет крошечную балку, заставляя робота медленно изгибаться и накапливать упругую энергию. После высвобождения эта энергия толкает робота вверх.
В предыдущих исследованиях ученые установили, что у жука-щелкуна есть специальная спиралевидная мышца. Она накапливает энергию и запускается, например, когда насекомое переворачивается на спину. Под действием резкого выпрямления этой мышцы тело жука подбрасывает на большую высоту, в несколько раз превышающую его размер. Тот же механизм работает и у роботов.
Одна из основных задач мелкомасштабной робототехники — поиск конструкции, которая была бы небольшой, но достаточно мощной, чтобы преодолевать препятствия или быстро покинуть опасные места.
Самех Тауфик, руководитель исследования
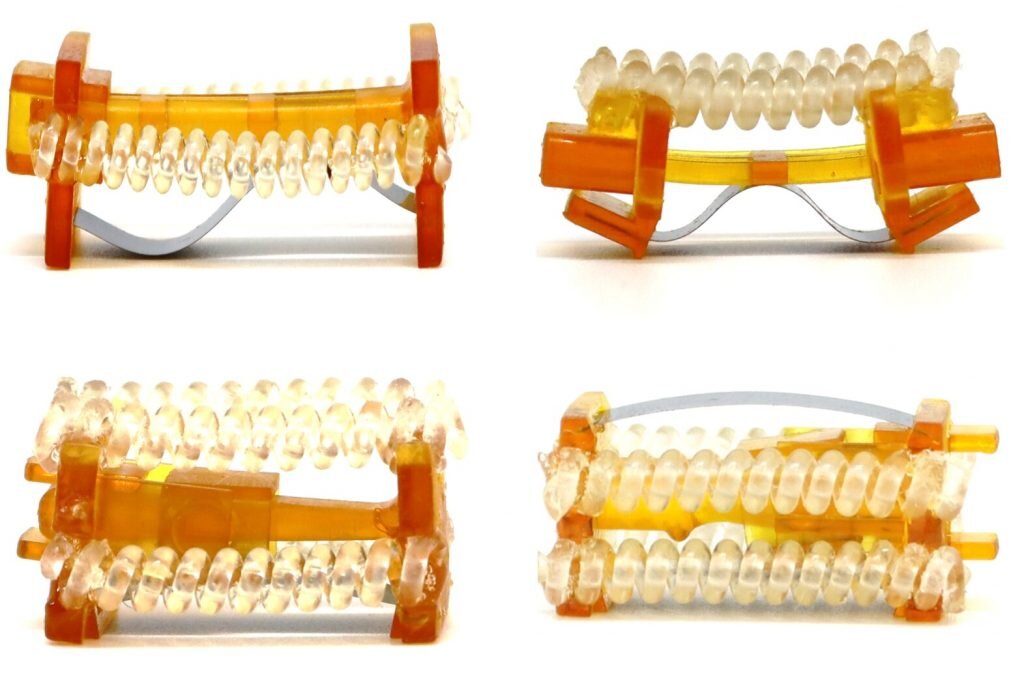
Варианты конструкций прыгающих роботов, предложенные исследователями. Изображение: University of Illinois Urbana-Champaign
Ученые полагают, что крошечные роботы будут проникать в труднодоступные места, чтобы помогать выполнять техническое обслуживание больших машин, таких как турбины и реактивные двигатели, или в сельском хозяйстве для обследования растений, например, делая снимки для выявления проблем.
Читать далее:
Гигантское солнечное пятно поворачивается к Земле. Его видно невооруженным взглядом
Посмотрите, как летает безлопастный самолет. Его скорость превышает 900 км/ч
Млечный Путь оказался аномально большим для своей галактической нити
На обложке: художественная иллюстрация идеи. Изображение: Michael Vincent, University of Illinois Urbana-Champaign