Всем здравствуйте. Регулятор скорости двигателя постоянного тока очень популярны и востребованы. Однако в редких случаях конструктивно удовлетворяет не всем потребностям, поэтому контроллеры появляются все чаще, различаясь только в элементной базе.
В этой статье еще немного расширим, но на этот раз это схема, которая позволяет в зависимости от выбора установки максимальной или минимальной скорости и непрерывного регулирования в определенном диапазоне. В любом случае изменение скорости является плавным, а не ступенчатым, однако следует иметь в виду, что импульсное управление обеспечивает плавный пуск нагруженного двигателя, но не меняет его основных характеристик, то есть зависимости скорости от нагрузки.
Если требуется лучший контроль, то ничего не остается, кроме тахогенератора или контроля тока якоря. Но это полностью отличается от простого контроллера. Таким образом, эта схема может успешно использоваться только с одним типом двигателей при одинаковой нагрузке. В противном случае результирующие скорости будут полностью отличаться от первоначально установленных.
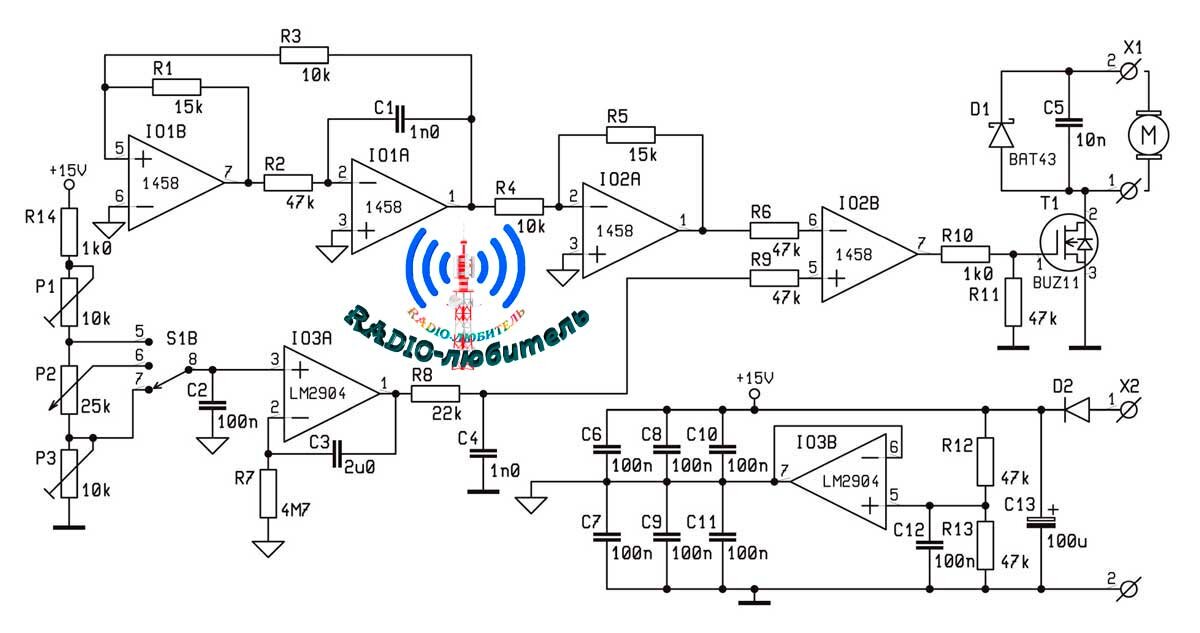
Основой схемы является компаратор IO2B, сравнивающий два разных напряжения. Инвертирующий вход этого компаратора соединен с генератором треугольных импульсов. Он состоит из интегратора IO1A с элементами C1 и R2, и IO1B в качестве переключателя управляющего напряжением для интегратора. Чередование зарядки и разрядки конденсатора через резистор создает требуемую треугольную форму сигнала на выходе операционного усилителя. Частота с приведенными значениями на схеме составляет около 8 кГц.
Полученный таким образом сигнал дополнительно усиливается в инвертирующем усилителе IO2A и затем подается на компаратор IO2B. Там создается прямоугольный сигнал с частотой, идентичным входящему сигналу, но с чередованием в зависимости от величины управляющего напряжением на не инвертирующем входе. Чем выше это напряжение, тем длинней периоды времени.
В интеграторе IO3A создается напряжение для не инвертирующего входа компаратора. Его выход копирует напряжение на не инвертирующем входе, но всегда с определенной задержкой по времени. Это связано с тем, что конденсатор и резистор включены в обратную связь, так что их постоянная составляющая определяет, как долго наступает состояние равенства. Это постепенно изменяющееся напряжение вызывает изменение на инверторе IO2B.
Величина выходного напряжения компаратора — фактически, скорость двигателя — может быть установлена на максимуме, минимуме или непрерывно в заданном диапазоне с помощью потенциометра P2. Переключающим элементом является транзистор N MOS-FET, управляемый компаратором IO2B. Транзистор работает в ключевом режиме, где сопротивление в закрытом состоянии при токе 15А составляет менее 50 мОм. Даже если мы признаем, что включение и выключение происходит не совсем идеально, но это процесс, который длится порядка десятков нс в результате зарядки или разрядки входной емкости транзистора, но потери мощности действительно минимальны.
В большинстве случаев дополнительный кулер не понадобится. Диод D1 и конденсатор C5 выполняют задачу устранения пиков напряжения, вызванных индуктивностью двигателя, которые в противном случае оказали бы чрезмерное напряжение на переключающий транзистор и могли привести к его выходу из строя.
Поскольку одно полярный источник питания мог бы усложнить конструкцию, в этом случае общая точка напряжения питания создается искусственно на операционном усилителе IO3. Он включен как монитор с опорным напряжением, заданным делителем на резисторах R12 / R13. Вход цепи питания защищен диодом D2 от случайного изменения полярности. Печатные платы приведены на рисунке.
Перед первым включением к источнику питания мы проверяем все соединения и можем приступить к запуску. Если имеется осциллограф в наличии, это идеально, потому что вместо двигателя достаточно подключить любой резистор и проверить работу на нем.
Если нет, то можно включить лампочку, на которой мы отслеживаем изменения яркости, должно хватить. Для окончательной настройки нам нужен двигатель, для которого предназначено устройство. С его помощью мы затем устанавливаем скорость с помощью потенциометров. Настройку должны повторить несколько раз, потому что потенциометры соединены последовательно, и изменение положения одного также повлияет на состояние другого. Всем спасибо.