Раньше, чтобы обучить робота походке, требовалось написание специальной программы под каждую ситуацию и поверхность. Потом инженеры стали применять обучение с подкреплением, когда робот учится посредством виртуальной симуляции и за удачные решения получает "награду", ускоряя процесс приобретения новых навыков в разы.
Теперь же, разработчики из Инженерной школы Витерби создали алгоритм, который помог роботизированной ноге научится походке быстро и без создания симуляций. Так, как это делают детеныши жирафов, всего через несколько минут после рождения становящиеся на ноги.
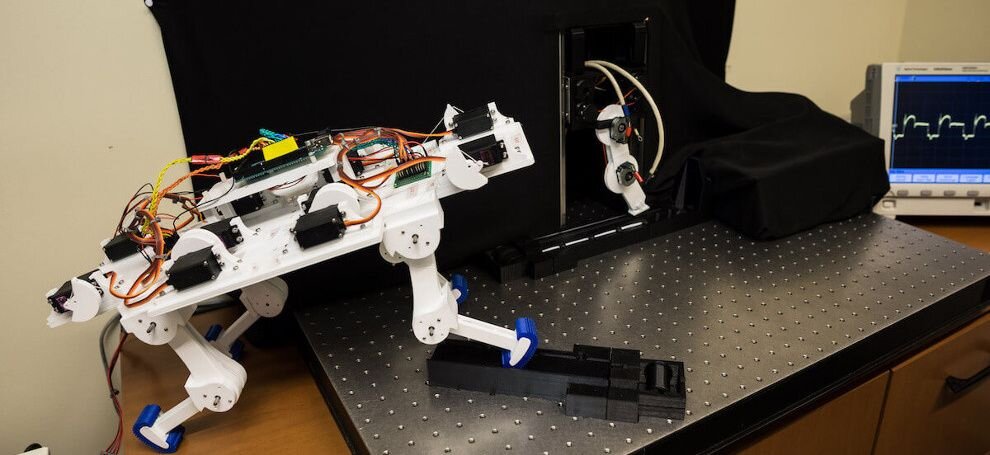
Робонога пробует, ошибается, делает выводы и подбирает наиболее удобный для своей конструкции и предложенной местности способ передвижения. При этом, благодаря накопленному опыту и пониманию своих возможностей, ей легче приспособиться к изменению окружающей среды. Таким образом, в будущем любой робот сможет самостоятельно обучиться ходьбе и выработать индивидуальную походку в любой среде обитания.