Робототехника продолжает продвигаться вперед, создавая все более усовершенствованные роботизированные системы, способные имитировать функции человеческого тела. В этой области особое внимание уделяется разработке роботизированных рук и захватов, которые позволяют роботам манипулировать объектами подобно тому, как это делают люди в повседневной жизни.
Однако, несмотря на значительные достижения, большинство существующих скелетных структур для роботизированных рук имеют сложную конструкцию и требуют высокотехнологичных компонентов, что затрудняет их масштабирование и производство в больших объемах. Исследователи из MIT представили новую роботизированную руку, которая обладает высокой точностью и легко масштабируется благодаря использованию широко распространенных методов производства, таких как 3D-печать и лазерная резка.
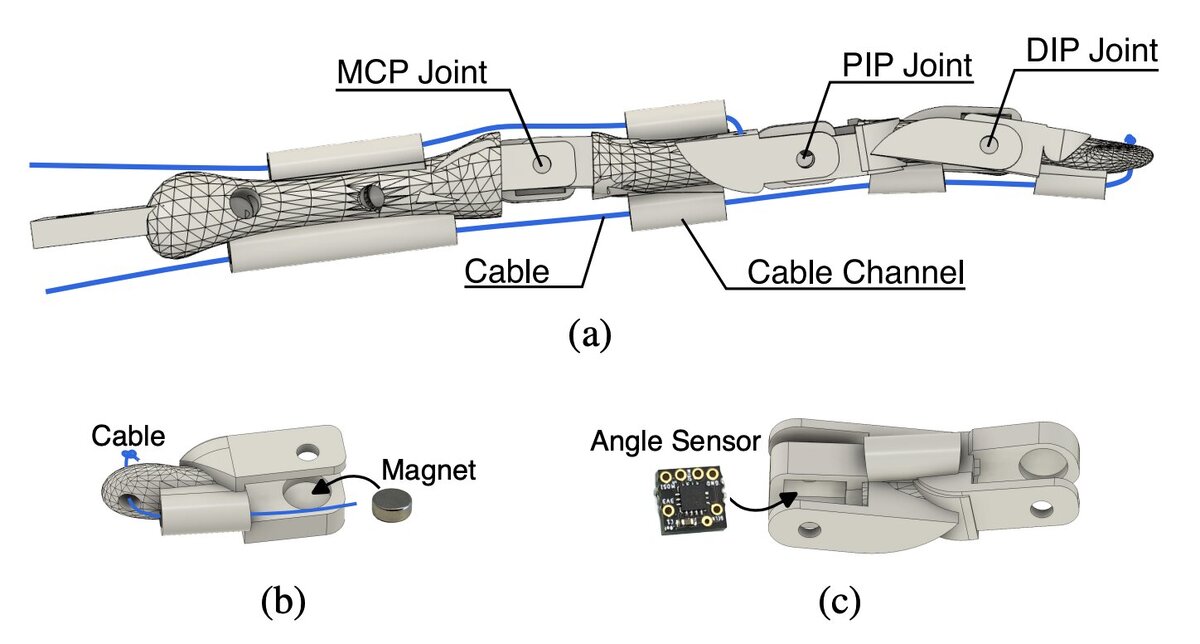
Основная особенность этой руки заключается в использовании модульной структуры, состоящей из нескольких строительных блоков, которые можно переставлять для достижения различных движений. Исследователи стремились создать гибкую роботизированную руку, которая не требует сложных и дорогостоящих компонентов. Они хотели достичь высокой степени подвижности, сравнимой с человеческими руками, чтобы робот мог выполнять различные повседневные задачи и манипуляции.
Эта новая концепция создания роботизированных конечностей является свежим подходом в области разработки робототехники. Такая роборука обладает высокой гибкостью и точностью, а также может быть произведена в больших масштабах с использованием доступных технологий. Такой подход открывает новые возможности для применения роботов в различных сферах, включая промышленность, медицину и помощь людям с ограниченными физическими возможностями
Источник:
Чао Лю и др., Модульная роботизированная рука с высокой чувствительностью, созданная на основе биотехнологий (Chao Liu et al, A Modular Bio-inspired Robotic Hand with High Sensitivity), Международная конференция IEEE по мягкой робототехнике (RoboSoft) 2023 г. (2023 г.). DOI: 10.1109/RoboSoft55895.2023.10121946
Благодарю за чтение! Если понравилась статья, то предлагаю подписаться, будет ещё много таких. Есть мысли по предмету статьи и не только - приглашаю в комментарии. Также, если интересно, можете ознакомиться со страницами нашего проекта на других платформах, ссылки найдёте в описании канала. Кроме того, у меня есть страница на сервисе поддержки авторов Бусти, просто сообщаю, поддержка - дело добровольное, ссылка так же в описании канала.