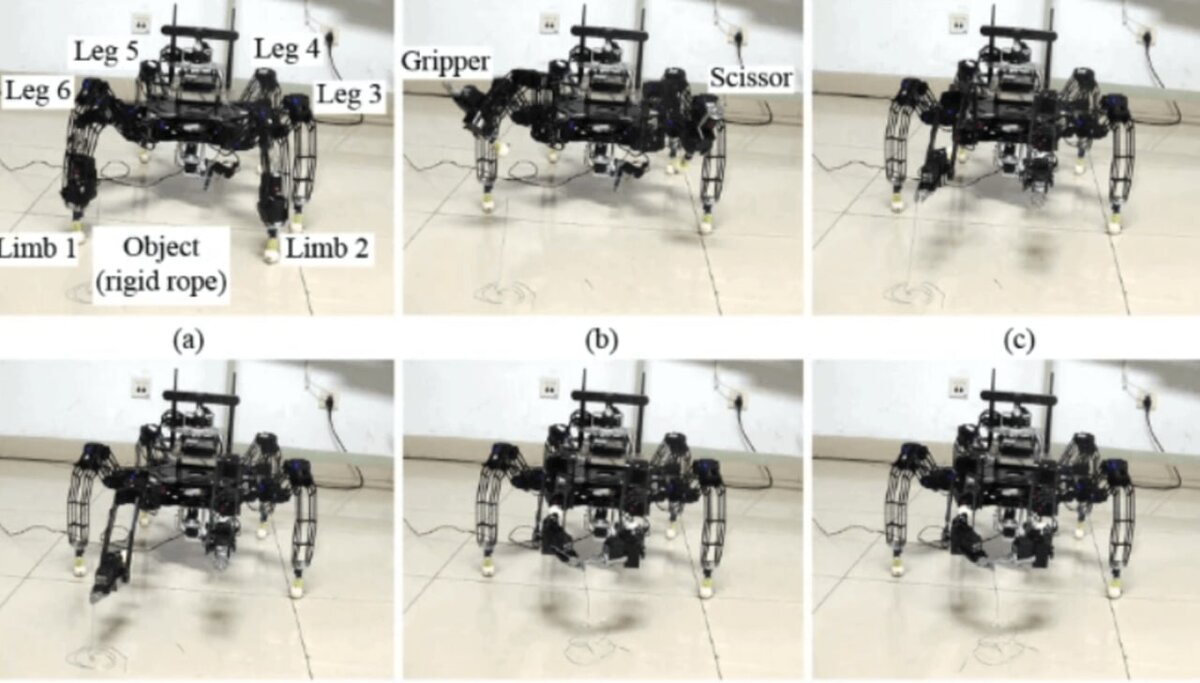
В Институте робототехники Университета Бэйхай (Китай) разработали многофункционального шестиногого робота, который может не только двигать всеми конечностями, но и манипулировать с их помощью предметами.
В последнее время растет спрос на гибких многофункциональных роботов. Если же у робота есть ноги для ходьбы, то для одновременной работы с предметами ему потребуется дополнительная конечность, что усложняет его изготовление и повысит стоимость.
В Университете Бэйхай создали прототип робота ALLOMAN hexapod, каждая из конечностей которого многофункциональна и взаимозаменяема. Благодаря интеграции ног и рук, он может мобильно манипулировать предметами. Сфера применимости такого робота может быть очень широка — от дорожных работ до исследования поверхности других планет.