Самоуправляемые автомобили и роботы доставки становятся все лучше и лучше. Но что нужно, чтобы сделать их идеальными?
Роботизированные транспортные средства используются в опасных условиях на протяжении десятилетий. Совсем недавно автономные транспортные средства от лодок до тележек для доставки продуктов совершили плавный переход из исследовательских центров в реальный мир с небольшим количеством нюансов.
Однако обещанное появление самоуправляемых автомобилей не продвинулось дальше стадии испытаний. А в одном из тест-драйвов самоуправляемого автомобиля Uber в 2018 году этот автомобиль сбил пешехода. Хотя эти несчастные случаи происходят каждый день, когда люди находятся за рулем, общественность придерживается гораздо более высоких стандартов безопасности, интерпретируя единичные аварии как доказательство того, что эти транспортные средства слишком опасны, чтобы выпускать их на дороги общего пользования.

Программирование идеального самоуправляемого автомобиля, который всегда будет принимать самое безопасное решение-это огромная техническая задача. В отличие от других автономных транспортных средств, которые обычно разворачиваются в строго контролируемых условиях, самоуправляемые автомобили должны функционировать в бесконечно непредсказуемой дорожной сети, быстро обрабатывая множество сложных переменных, чтобы оставаться в безопасности.
Вдохновленные кодексом дорожного движения, команды профессионалов работают над набором правил, которые помогут самоуправляемым автомобилям принимать самые безопасные решения во всех мыслимых сценариях. Проверка того, что эти правила работают-это последнее препятствие, которое нужно преодолеть, чтобы безопасно вывести надежные самоуправляемые автомобили на наши дороги.
Первый закон Азимова
Автор научной фантастики Айзек Азимов написал "три закона робототехники” в 1942 году. Первый и самый важный закон гласит: “Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред”.
Команды профессионалов в Национальном роботариуме ведут исследования, призванные гарантировать, что самоуправляемые транспортные средства всегда будут принимать решения, соответствующие этому закону. Такая гарантия обеспечила бы решение очень серьезных проблем безопасности, которые мешают самоуправляемым автомобилям разлететься по всему миру.
Программное обеспечение ИИ на самом деле довольно хорошо изучает сценарии, с которыми оно никогда не сталкивалось. Используя “нейронные сети”, которые черпают вдохновение из структуры человеческого мозга. Такие программы могут обнаруживать паттерны в данных, таких как движения автомобилей и пешеходов, а затем вспоминать эти паттерны в новых сценариях.
Но нам все еще нужно доказать, что любые правила безопасности, которым обучают самоуправляемые автомобили, будут работать в этих новых сценариях. Для этого мы можем обратиться к формальной верификации-методу, с помощью которого компьютерщики доказывают, что правило работает при любых обстоятельствах.
В математике, например, правила могут доказать, что x + y равно y + x, не проверяя каждое возможное значение x и y. Формальная верификация делает нечто подобное: она позволяет нам доказать, как программное обеспечение ИИ будет реагировать на различные сценарии без необходимости исчерпывающего тестирования каждого сценария, который может произойти на дорогах общего пользования.
Одним из наиболее заметных недавних успехов в этой области является верификация системы искусственного интеллекта, которая использует нейронные сети, чтобы избежать столкновений между автономными самолетами. Исследователи успешно официально подтвердили, что система всегда будет реагировать правильно, независимо от горизонтальных и вертикальных маневров задействованного самолета.
Кодирование шоссе
Люди-водители следуют правилам дорожного движения, чтобы обеспечить безопасность всех участников дорожного движения, которые полагаются на человеческий мозг, чтобы изучить эти правила и разумно применять их в бесчисленных реальных сценариях. Мы также можем научить самоуправляемые автомобили дорожному кодексу. Это требует, чтобы мы распаковали каждое правило в коде, научили нейронные сети транспортных средств понимать, как подчиняться каждому правилу, а затем проверили, что на них можно положиться, чтобы безопасно подчиняться этим правилам при любых обстоятельствах.
Однако проблема проверки того, что эти правила будут соблюдаться безопасно, усложняется при рассмотрении последствий фразы “никогда не должен” в дорожном кодексе. Чтобы сделать самоуправляемый автомобиль таким же реактивным, как и водитель-человек в любом конкретном сценарии, мы должны запрограммировать эти политики таким образом, чтобы учитывать нюансы, взвешенный риск и случайный сценарий, когда различные правила находятся в прямом конфликте, требуя, чтобы автомобиль игнорировал один или несколько из них.
Такая задача не может быть оставлена исключительно программистам – она потребует участия юристов, экспертов по безопасности, системных инженеров и политиков.
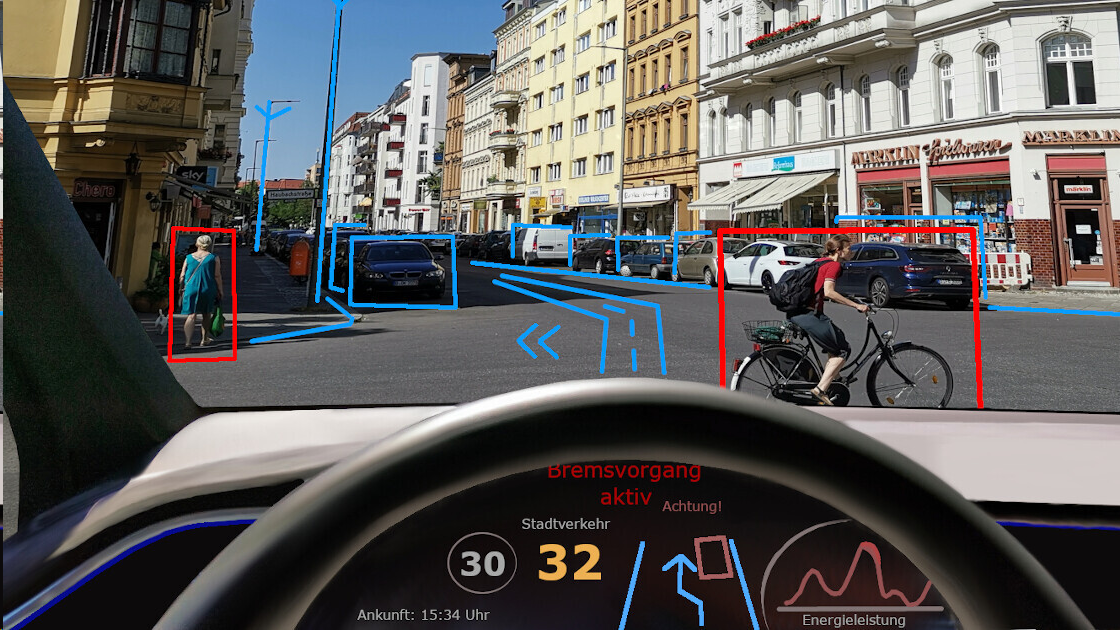
Аварии с участием самоуправляемых автомобилей всегда создают заголовки. Самоуправляемая машина, которая распознает пешехода и останавливается, прежде чем сбить его, в 99% случаев является поводом для празднования в исследовательских лабораториях, но так же машиной для убийства в реальном мире. Создавая надежные, поддающиеся проверке правила безопасности для самоуправляемых автомобилей, команда профессионалов пытается сделать так, чтобы этот 1% аварий остался в прошлом.